Le projet Buildroot permet de construire facilement un système embarqué et d’en ajuster finement le contenu. Pour produire des systèmes autonomes robustes, résilients et reproductibles, on préfère cette approche à l'utilisation d'une distribution pré-compilée dont le contenu est assez mal maîtrisé. Nous allons utiliser Buildroot pour construire un système personnalisé pour Raspberry Pi.
Les développeurs de Buildroot nous fournissent une nouvelle version chaque trimestre. Celle de février est une version maintenue sur le long terme pendant toute l'année, alors que celles de mai, août et novembre sont des versions intermédiaires marquant les évolutions du projet.
Cet article a été mis à jour en mars 2020 pour prendre en considération Buildroot 2020.02 (la dernière version «long term» disponible à ce jour) et testé sur Raspberry Pi 4.
Les fichiers produits au cours de cet article sont regroupés ici :
https://www.blaess.fr/christophe/buildroot-lab/pi4-config.tar.bz2
Commençons par créer une arborescence de travail qui contiendra tous nos fichiers personnalisés, les répertoires de construction, les archives des projets compilés par Buildroot, etc.
[~]$ mkdir br-lab [~]$ cd br-lab [br-lab]$
Au sein de cet environnement, nous allons respecter une organisation des
fichiers assez répandue lorsque l'on utilise Buildroot :
le répertoire des sources de Buildroot restera intact et nous pourrons faire
toutes les compilations dans des répertoires build-... pour les
différentes cibles.
Nous verrons par la suite comment sauvegarder toutes nos configurations
spécifiques dans un external tree.
Nous téléchargeons l'archive de la dernière version de Buildroot, et la décompressons :
[br-lab]$ wget http://www.buildroot.org/downloads/buildroot-2020.02.tar.bz2 [br-lab]$ tar xf buildroot-2020.02.tar.bz2
Comme indiqué plus haut, nous allons travailler dans un répertoire de compilation indépendant des sources de Buildroot. Ainsi on peut enchaîner plusieurs builds successifs pour différentes architectures ou différents projets en conservant les sources originales intactes. Par acquit de conscience j'ai même l'habitude pour m'assurer qu'aucune modification n'interviendra dans les sources de Buildroot d'y interdire l'accès en écriture :
[br-lab]$ chmod -R -w buildroot-2020.02
C'est un peu paranoïaque, j'en conviens, mais cela me garantit qu'aucun fichier de configuration ne pourra être sauvegardé par erreur dans cette arborescence dans le cas d'une faute de frappe dans le nom d'une variable d'environnement sur une ligne de commande.
Nous allons demander à Buildroot de préparer une configuration par défaut pour Raspberry Pi 4. Puis nous la modifierons très légèrement dans un premier temps, et l'affinerons de manière plus importante ensuite. Voyons les configurations disponibles (longue liste !) :
[br-lab]$ cd buildroot-2020.02/ [buildroot-2020.02]$ ls configs/ aarch64_efi_defconfig acmesystems_aria_g25_128mb_defconfig acmesystems_aria_g25_256mb_defconfig acmesystems_arietta_g25_128mb_defconfig acmesystems_arietta_g25_256mb_defconfig amarula_a64_relic_defconfig amarula_vyasa_rk3288_defconfig andes_ae3xx_defconfig arcturus_ucls1012a_defconfig arcturus_ucp1020_defconfig armadeus_apf27_defconfig armadeus_apf28_defconfig armadeus_apf51_defconfig arm_foundationv8_defconfig arm_juno_defconfig asus_tinker_rk3288_defconfig at91sam9260eknf_defconfig at91sam9g20dfc_defconfig at91sam9g45m10ek_defconfig at91sam9rlek_defconfig at91sam9x5ek_defconfig at91sam9x5ek_dev_defconfig at91sam9x5ek_mmc_defconfig at91sam9x5ek_mmc_dev_defconfig atmel_sama5d27_som1_ek_mmc_dev_defconfig atmel_sama5d2_xplained_mmc_defconfig atmel_sama5d2_xplained_mmc_dev_defconfig atmel_sama5d3xek_defconfig atmel_sama5d3_xplained_defconfig atmel_sama5d3_xplained_dev_defconfig atmel_sama5d3_xplained_mmc_defconfig atmel_sama5d3_xplained_mmc_dev_defconfig atmel_sama5d4_xplained_defconfig atmel_sama5d4_xplained_dev_defconfig atmel_sama5d4_xplained_mmc_defconfig atmel_sama5d4_xplained_mmc_dev_defconfig bananapi_m1_defconfig bananapi_m2_plus_defconfig bananapi_m2_ultra_defconfig bananapi_m64_defconfig bananapro_defconfig beagleboardx15_defconfig beagleboneai_defconfig beaglebone_defconfig beaglebone_qt5_defconfig beelink_gs1_defconfig chromebook_snow_defconfig ci20_defconfig csky_gx6605s_defconfig cubieboard2_defconfig engicam_imx6qdl_icore_defconfig engicam_imx6qdl_icore_qt5_defconfig engicam_imx6qdl_icore_rqs_defconfig engicam_imx6ul_geam_defconfig engicam_imx6ul_isiot_defconfig freescale_imx28evk_defconfig freescale_imx6dlsabreauto_defconfig freescale_imx6dlsabresd_defconfig freescale_imx6qsabreauto_defconfig freescale_imx6qsabresd_defconfig freescale_imx6sxsabresd_defconfig freescale_imx7dsabresd_defconfig freescale_imx8mmevk_defconfig freescale_imx8mqevk_defconfig freescale_imx8qxpmek_defconfig freescale_p1025twr_defconfig freescale_t1040d4rdb_defconfig freescale_t2080_qds_rdb_defconfig friendlyarm_nanopi_a64_defconfig friendlyarm_nanopi_neo2_defconfig friendlyarm_nanopi_neo_plus2_defconfig galileo_defconfig grinn_chiliboard_defconfig grinn_liteboard_defconfig hifive_unleashed_defconfig imx23evk_defconfig imx6-sabreauto_defconfig imx6-sabresd_defconfig imx6-sabresd_qt5_defconfig imx6slevk_defconfig imx6sx-sdb_defconfig imx6ulevk_defconfig imx6ulpico_defconfig imx7dpico_defconfig imx7d-sdb_defconfig imx8mmpico_defconfig imx8mpico_defconfig lafrite_defconfig lego_ev3_defconfig licheepi_zero_defconfig linksprite_pcduino_defconfig minnowboard_max_defconfig minnowboard_max-graphical_defconfig mx25pdk_defconfig mx51evk_defconfig mx53loco_defconfig mx6cubox_defconfig mx6sx_udoo_neo_defconfig mx6udoo_defconfig nanopi_m1_defconfig nanopi_m1_plus_defconfig nanopi_neo_defconfig nexbox_a95x_defconfig nitrogen6sx_defconfig nitrogen6x_defconfig nitrogen7_defconfig nitrogen8m_defconfig odroidxu4_defconfig olimex_a10_olinuxino_lime_defconfig olimex_a13_olinuxino_defconfig olimex_a20_olinuxino_lime2_defconfig olimex_a20_olinuxino_lime_defconfig olimex_a20_olinuxino_micro_defconfig olimex_a33_olinuxino_defconfig olimex_a64_olinuxino_defconfig olimex_imx233_olinuxino_defconfig openblocks_a6_defconfig orangepi_lite2_defconfig orangepi_lite_defconfig orangepi_one_defconfig orangepi_one_plus_defconfig orangepi_pc2_defconfig orangepi_pc_defconfig orangepi_pc_plus_defconfig orangepi_plus_defconfig orangepi_prime_defconfig orangepi_r1_defconfig orangepi_win_defconfig orangepi_zero_defconfig orangepi_zero_plus2_defconfig pandaboard_defconfig pc_x86_64_bios_defconfig pc_x86_64_efi_defconfig pine64_defconfig pine64_sopine_defconfig qemu_aarch64_virt_defconfig qemu_arm_versatile_defconfig qemu_arm_versatile_nommu_defconfig qemu_arm_vexpress_defconfig qemu_arm_vexpress_tz_defconfig qemu_csky610_virt_defconfig qemu_csky807_virt_defconfig qemu_csky810_virt_defconfig qemu_csky860_virt_defconfig qemu_m68k_mcf5208_defconfig qemu_m68k_q800_defconfig qemu_microblazebe_mmu_defconfig qemu_microblazeel_mmu_defconfig qemu_mips32r2el_malta_defconfig qemu_mips32r2_malta_defconfig qemu_mips32r6el_malta_defconfig qemu_mips32r6_malta_defconfig qemu_mips64el_malta_defconfig qemu_mips64_malta_defconfig qemu_mips64r6el_malta_defconfig qemu_mips64r6_malta_defconfig qemu_nios2_10m50_defconfig qemu_or1k_defconfig qemu_ppc64_e5500_defconfig qemu_ppc64le_pseries_defconfig qemu_ppc64_pseries_defconfig qemu_ppc_g3beige_defconfig qemu_ppc_mac99_defconfig qemu_ppc_mpc8544ds_defconfig qemu_ppc_virtex_ml507_defconfig qemu_riscv32_virt_defconfig qemu_riscv64_virt_defconfig qemu_sh4eb_r2d_defconfig qemu_sh4_r2d_defconfig qemu_sparc64_sun4u_defconfig qemu_sparc_ss10_defconfig qemu_x86_64_defconfig qemu_x86_defconfig qemu_xtensa_lx60_defconfig qemu_xtensa_lx60_nommu_defconfig raspberrypi0_defconfig raspberrypi0w_defconfig raspberrypi2_defconfig raspberrypi3_64_defconfig raspberrypi3_defconfig raspberrypi3_qt5we_defconfig raspberrypi4_64_defconfig raspberrypi4_defconfig raspberrypi_defconfig riotboard_defconfig rock64_defconfig roseapplepi_defconfig s6lx9_microboard_defconfig sheevaplug_defconfig snps_aarch64_vdk_defconfig snps_arc700_axs101_defconfig snps_archs38_axs103_defconfig snps_archs38_haps_defconfig snps_archs38_hsdk_defconfig snps_archs38_vdk_defconfig socrates_cyclone5_defconfig solidrun_clearfog_defconfig solidrun_clearfog_gt_8k_defconfig solidrun_macchiatobin_mainline_defconfig solidrun_macchiatobin_marvell_defconfig stm32f429_disco_defconfig stm32f469_disco_defconfig stm32mp157c_dk2_defconfig toradex_apalis_imx6_defconfig ts4900_defconfig ts5500_defconfig ts7680_defconfig wandboard_defconfig warp7_defconfig warpboard_defconfig zynq_microzed_defconfig zynqmp_zcu106_defconfig zynq_zc706_defconfig zynq_zed_defconfig [buildroot-2020.02]$
Nous voyons que Buildroot intègre un nombre assez conséquent de configurations toutes prêtes pour des plateformes variées. Même si vous ne trouvez pas celle qui correspond exactement à votre cible, il est souvent possible de choisir une configuration pour un system-on-chip proche et de l'ajuster assez facilement.
Nous avons prévu de construire un système pour Raspberry Pi 4, aussi je demande à Buildroot de me préparer une configuration pour cette cible :
[buildroot-2020.02]$ make O=../build-pi4 raspberrypi4_defconfig [...] # # configuration written to /home/cpb/br-lab/build-pi4/.config #
Analysons le contenu de la ligne saisie :
make : le projet Buildroot utilise
comme moteur de compilation l'outil «make». Les
recettes servant à configurer ou produire une image seront ainsi des
«Makefile» ou des fragments de
«Makefile». Ceci n'est pas sans rappeler la
commande «bitbake» employée pour remplir ce
rôle lorsqu'on utilise
Yocto Project.
O=../build-pi4 : pour éviter de
polluer les sources de Buildroot, nous ferons tout notre travail dans
un répertoire indépendant. On mentionne ici le nom de ce répertoire, en
l'indiquant dans la variable «O» (la lettre
«O» majuscule, comme Output, pas le
chiffre zéro). Comme le répertoire n'existe pas encore, Buildroot va le
créer.
raspberrypi4_defconfig : le fichier
de configuration pour notre plateforme, tel qu'il se trouve dans le
répertoire «configs/» vu plus haut. Lorsque
nous aurons personnalisé cette configuration, nous verrons comment
l'intégrer dans une arborescence external personnelle.
Maintenant que la configuration a été préparée dans notre répertoire de compilation, nous pouvons nous y rendre pour continuer le travail, nous n'aurons plus besoin de revenir dans les sources de Buildroot.
[buildroot-2020.02]$ cd ../build-pi4/ [build-pi4]$ ls build Makefile [build-pi4]$ ls -a . .br2-external.in.openssl build .. .br2-external.in.paths .config .br2-external.in.jpeg .br2-external.in.toolchains Makefile .br2-external.in.menus .br2-external.mk [build-pi4]$
Pour information, la configuration ainsi préparée est enregistrée dans le
fichier «.config» (dont le nom commence par un
point ce qui le rend invisible à la commande «ls»
sauf si elle est suivie de l'option «-a»).
Il s'agit d'un fichier de définitions de constantes pour
«make» :
[build-pi4]$ cat .config # # Automatically generated file; DO NOT EDIT. # Buildroot 2020.02 Configuration # BR2_HAVE_DOT_CONFIG=y BR2_HOST_GCC_AT_LEAST_4_9=y BR2_HOST_GCC_AT_LEAST_5=y BR2_HOST_GCC_AT_LEAST_6=y BR2_HOST_GCC_AT_LEAST_7=y [...] # BR2_ELF2FLT is not set # BR2_VFP_FLOAT is not set # BR2_PACKAGE_GCC_TARGET is not set # BR2_HAVE_DEVFILES is not set [build-pi4]$
Dans un premier temps nous allons faire quelques personnalisations rapides, nous y reviendrons plus en détail ultérieurement.
Pour cela nous demandons le menu de configuration de Buildroot. Comme nous
l'avons indiqué, on fait appel à «make» pour
interagir avec Buildroot :
[build-pi4]$ make menuconfig [...]
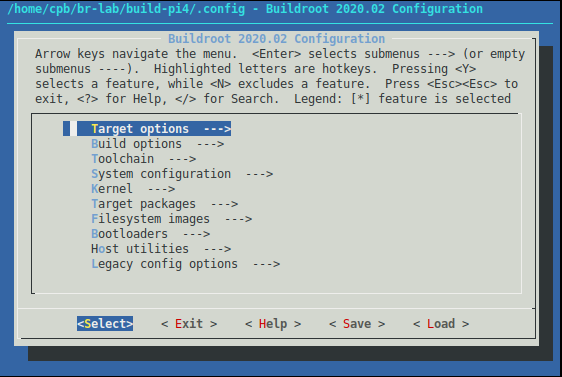
Un menu de configuration semblable à celui de la figure 1 s'ouvre.
Le menu est affiché en utilisant la bibliothèque Ncurses.
Il existe des commandes équivalentes pour afficher le menu avec les
bibliothèques Qt («make xconfig») ou Gtk
(«make gconfig»).
Le premier sous-menu «Target options» contient
essentiellement des paramètres correspondant à certaines options du
compilateur. Nous voyons sur la figure 2 la configuration pour un Raspberry
Pi 4.
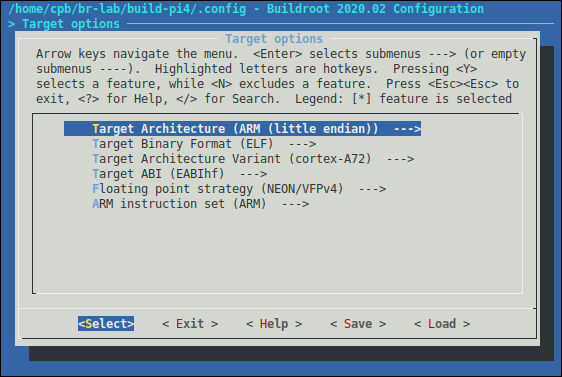
Dans notre cas, il n'y a pas de raison de modifier le contenu de ce sous-menu mais on peut en profiter pour jeter un œil à la variété des processeurs supportés directement par Buildroot.
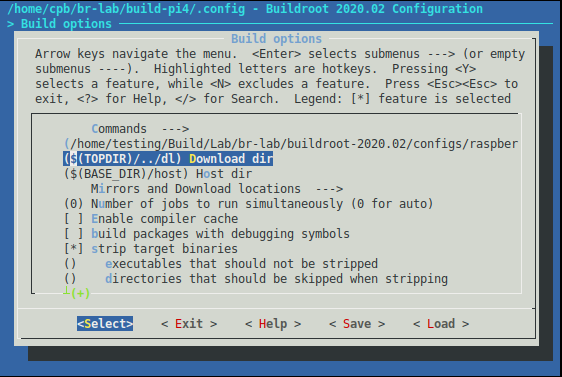
Le sous-menu «Build options» contient de nombreux
paramètres permettant de configurer la manière de compiler le système.
Une modification que je conseille : celle de l'option
«Download dir». Il s'agit de
l'emplacement où les packages téléchargés sont stockés avant d'être extraits
et compilés. Par défaut il s'agit du sous-répertoire
«dl» dans le répertoire de Buildroot.
Mais nous avons supprimé les droits d'écriture sur ce dernier.
Il faut donc extraire le répertoire «dl» en le
remontant d'un cran. Ceci permet en outre de mutualiser les téléchargements
entre les différents builds que l'on est amené à réaliser.
Sur la figure 3, on voit que j'ai édité le champ «Download
dir» pour insérer un «../» avant
«dl».
Le sous-menu «Toolchain» permet de configurer
des paramètres de la chaîne de cross-compilation.
Tout d'abord on peut choisir d'utiliser une chaîne de compilation produite
par Buildroot (le cas par défaut) ou une toolchain externe,
précompilée et téléchargée depuis certains sites de références (Linaro par
exemple). Bien que cette dernière solution soit plus rapide, je la
déconseille pour des raisons de pérennité et de reproductibilité du système
de compilation.
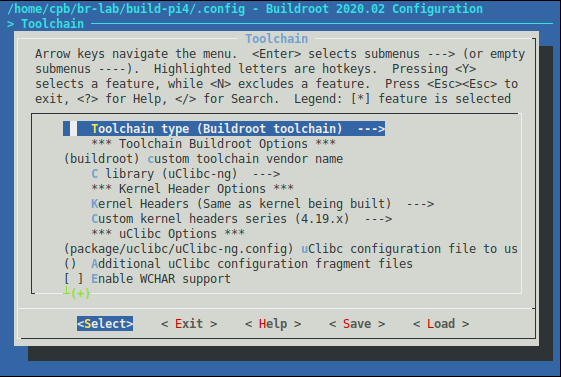
Un second choix important concerne la bibliothèque C à
employer pendant la production du compilateur et à installer sur la cible.
C’est une décision qui dépend beaucoup du code métier.
La bibliothèque C est un point-clé du système ; c’est elle qui permet
d’entrer dans le noyau pour bénéficier de ses services (les appels-système).
Le choix par défaut est celui de la «uclibc-ng»,
une bibliothèque spécialement dédiée aux systèmes embarqués restreints.
C'est la solution que je vais conserver ici, mais les alternatives
«glibc» et «musl» sont
tout aussi acceptables.
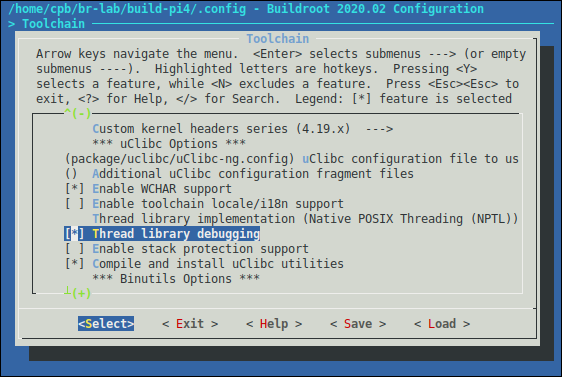
Je vais modifier deux options que l'on voit sur la figure 4 :
Enable WCHAR
support» afin d'intégrer dans la bibliothèque C le
suport des caractères larges (multi-octets) qui est nécessaire pour de
nombreux packages proposés par Buildroot.
Thread library
debug» pour pouvoir utiliser le débogueur
«gdbserver» lors de la mise au point du code
applicatif.
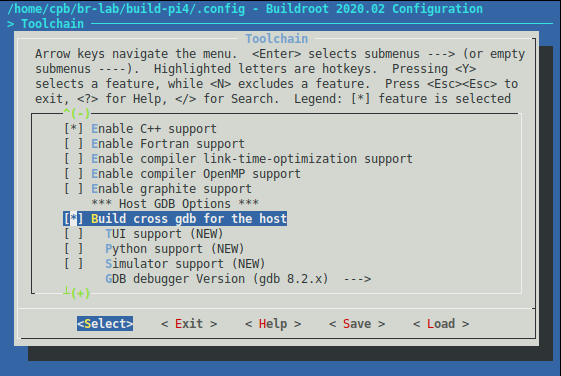
Enfin, j'active l'option «Build cross gdb for the
host» comme on le voit sur la figure 6, pour produire
tout de suite le débogueur qui fonctionnera sur la machine hote (le PC).
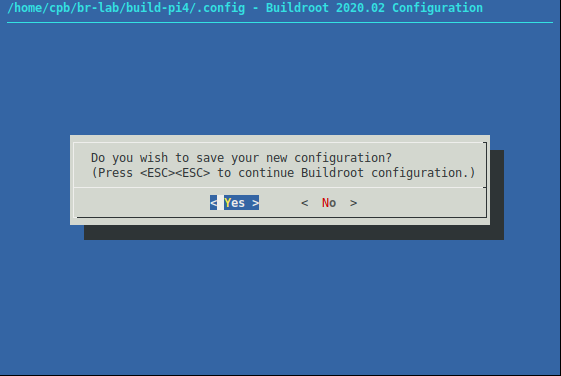
Pour le moment, nous nous limitons à ces modifications, nous examinerons le contenu des autres menus ultérieurement. Nous pouvons quitter en sauvegardant la configuration comme sur la figure 7.
Pour lancer la production de cette image, rien de plus simple :
[build-pi4]$ make [...]
La première compilation est plus longue que les suivantes, du fait de la génération de la toolchain et de la compilation du noyau. La durée exacte dépend beaucoup de la machine hôte et de la connexion Internet, mais on peut considérer environ une heure sur une machine d'entrée de gamme. La compilation se termine ainsi :
INFO: vfat(boot.vfat): cmd: "MTOOLS_SKIP_CHECK=1 mcopy -bsp -i '/home/cpb/br-lab/build-pi4/images/boot.vfat' '/home/cpb/br-lab/build-pi4/images/rpi-firmware/overlays' '::'" (stderr): INFO: vfat(boot.vfat): adding file 'zImage' as 'zImage' ... INFO: vfat(boot.vfat): cmd: "MTOOLS_SKIP_CHECK=1 mcopy -bsp -i '/home/cpb/br-lab/build-pi4/images/boot.vfat' '/home/cpb/br-lab/build-pi4/images/zImage' '::'" (stderr): INFO: hdimage(sdcard.img): adding partition 'boot' (in MBR) from 'boot.vfat' ... INFO: hdimage(sdcard.img): adding partition 'rootfs' (in MBR) from 'rootfs.ext4' ... INFO: hdimage(sdcard.img): writing MBR [build-pi4]$
De nouveaux sous-répertoires sont apparus dans notre répertoire de travail.
[build-pi4]$ ls build host images Makefile staging target
build/» que
Buildroot travaille pour compiler les différents packages qu'il
produit. On y trouve un sous-répertoire pour chaque package, y
compris le kernel, la toolchain et les outils qu'il
utilise sur la machine de compilation (préfixés par
«host-»).
host» contient
la chaîne de cross-compilation. Nous pourrons l'appeler
directement ou demander à Buildroot de nous l'exporter dans une archive
pour la partager avec d'autres développeurs.
images»
contient comme son nom l'indique les images produites : celle du
noyau, du root filesystem, du device tree, du
bootloader, etc. Pour nous simplifier l'installation sur le
Raspberry Pi, nous y trouverons même une image de l'ensemble de la carte
SD.
stagging» est
en réalité un lien symbolique vers le «sysroot»
de la toolchain. Son rôle reste un peu mystérieux pour moi, je
n'ai jamais eu besoin de m'en préoccuper.
target»
une copie de l'arborescence du root filesystem de la cible.
Elle est utilisée comme stockage avant la production de l'image finale.
Toutefois les propriétaires et groupes des fichiers ne sont pas
représentatifs de ceux que nous retrouverons sur la cible. C'est pour
cela qu'on y trouve un fichier d'avertissement avec un nom surprenant de
prime abord :
[build-pi4]$ ls target/ bin lib media proc sbin tmp dev lib32 mnt root sys usr etc linuxrc opt run THIS_IS_NOT_YOUR_ROOT_FILESYSTEM var [build-pi4]$
Pour le moment nous nous intéressons au répertoire
«images»
[build-pi4]$ ls images/ bcm2711-rpi-4-b.dtb rootfs.ext2 rpi-firmware zImage boot.vfat rootfs.ext4 sdcard.img [build-pi4]$
Les fichiers qu'il contient sont les suivants :
zImage» le noyau Linux et
«bcm2711-rpi-4-b.dtb le device
tree décrivant le matériel,
rpi-firmware/» les fichiers
précompilés du bootloader spécifique au Raspberry Pi,
boot.vfat» une copie binaire
du contenu de la première partition contenant les éléments ci-dessus,
formatée en VFAT (Fat 32),
rootfs.ext2» et le lien
symbolique «rootfs.ext4»
représentent une image binaire du contenu de la seconde partition
(regroupant l'arborescence que nous avons vue dans le répertoire
«target/» plus haut),
sdcard.img» une image binaire
contenant une table des partitions et les deux images de partitions
précédentes. C'est ce dernier fichier que nous allons copier sur une
carte micro-SD.
J'exécute la commande suivante sur mon PC :
[build-pi4]$ lsblk NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT sda 8:0 0 465,8G 0 disk ├─sda1 8:1 0 400G 0 part /home/testing └─sda2 8:2 0 8G 0 part [SWAP] sdb 8:16 0 931,5G 0 disk └─sdb1 8:17 0 512G 0 part /media/cpb/USB-EXT nvme0n1 259:0 0 232,9G 0 disk ├─nvme0n1p1 259:1 0 512M 0 part /boot/efi ├─nvme0n1p2 259:2 0 224,6G 0 part / └─nvme0n1p3 259:3 0 7,8G 0 part └─cryptswap1 253:0 0 7,8G 0 crypt [build-pi4]$
On voit tous les périphériques «blocks» présents :
«nvme0n1» le SSD principal du système,
«sda» un disque dur SATA interne de travail,
«sdb» un disque externe USB.
Je connecte ensuite une carte micro-SD insérée dans un adpateur USB, puis
je relance la même commande après quelques secondes d'attente pour que
l'auto-monteur ait terminé son travail :
[build-pi4]$ lsblk NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT sda 8:0 0 465,8G 0 disk ├─sda1 8:1 0 400G 0 part /home/testing └─sda2 8:2 0 8G 0 part [SWAP] sdb 8:16 0 931,5G 0 disk └─sdb1 8:17 0 512G 0 part /media/cpb/USB-EXT sdc 8:32 1 3,8G 0 disk ├─sdc1 8:33 1 32M 0 part /media/cpb/0B09-D1D7 └─sdc2 8:34 1 256M 0 part /media/cpb/0af348dc-34fe-4482-b341-a87 nvme0n1 259:0 0 232,9G 0 disk ├─nvme0n1p1 259:1 0 512M 0 part /boot/efi ├─nvme0n1p2 259:2 0 224,6G 0 part / └─nvme0n1p3 259:3 0 7,8G 0 part └─cryptswap1 253:0 0 7,8G 0 crypt
Je vois que le périphérique apparu est «/dev/sdc/».
Je démonte les partitions montées automatiquement et je copie l'image
produite par Buildroot sur ce périphérique. Attention,
cette étape est potentiellement dangereuse (comme tout ce qu'on préfixe par
«sudo»), soyez attentif pour ne pas écraser votre
disque système par mégarde...
[build-pi4]$ umount /dev/sdc? [build-pi4]$ sudo cp images/sdcard.img /dev/sdc
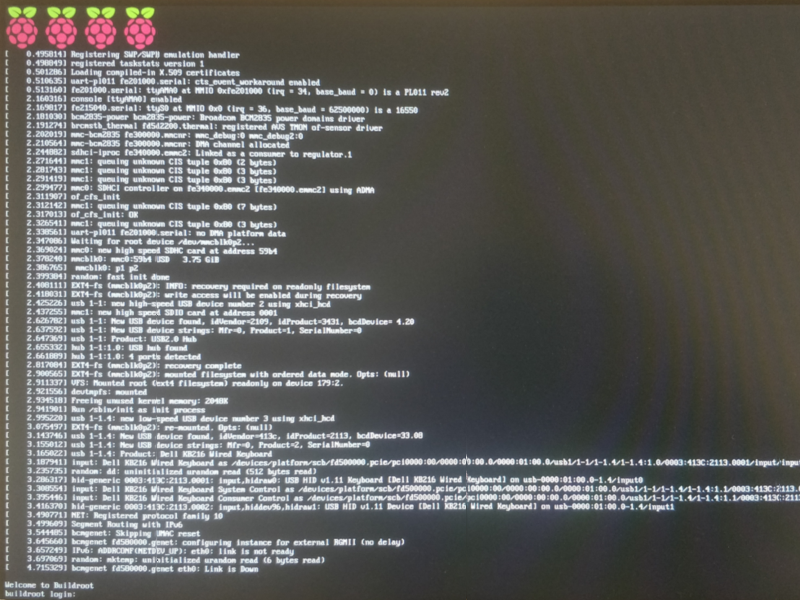
Une fois la copie terminée, insérons la carte SD dans le Raspberry Pi 4 et démarrons-le.
J'ai connecté un écran sur l'une des sorties mini-HDMI. Nous voyons sur la figure 8 les traces de boot avec les fameuses framboises emblèmatiques du Raspberry Pi.
Nous pouvons nous connecter avec l'identité «root»
(pas de mot de passe pour le moment), et passer quelques commandes comme
sur la figure 9. Une remarque : le clavier est configuré en
«Qwerty» ce qui nécessite une petite gymnastique si on ne
dispose que d'un clavier «Azerty».

Les photos d'écran étant difficiles à lire, je vais désormais afficher
plutôt des captures prises sur un terminal
(«minicom») connecté sur le port série du Raspberry
Pi avec un câble USB-Série
de ce genre (ne pas
connecter le fil rouge).
Welcome to Buildroot
buildroot login: root
# uname -a
Linux buildroot 4.19.97-v7l #1 SMP Sun Mar 8 23:43:48 CET 2020 armv7l GNU/Linux
# cat /proc/device-tree/model
Raspberry Pi 4 Model B Rev 1.1#
# free
total used free shared buff/cache available
Mem: 1962164 20664 1938580 48 2920 1929232
Swap: 0 0 0
#
Nous voyons ici Buildroot fonctionner sur un Raspberry Pi 4 avec
2 Gb de RAM. La commande «ps» nous affiche la
liste des processus présents :
# ps
PID USER COMMAND
1 root init
2 root [kthreadd]
3 root [rcu_gp]
4 root [rcu_par_gp]
6 root [kworker/0:0H-kb]
7 root [kworker/u8:0-ev]
8 root [mm_percpu_wq]
9 root [ksoftirqd/0]
10 root [rcu_sched]
11 root [rcu_bh]
12 root [migration/0]
13 root [cpuhp/0]
14 root [cpuhp/1]
15 root [migration/1]
16 root [ksoftirqd/1]
17 root [kworker/1:0-eve]
18 root [kworker/1:0H-kb]
19 root [cpuhp/2]
20 root [migration/2]
21 root [ksoftirqd/2]
22 root [kworker/2:0-eve]
24 root [cpuhp/3]
25 root [migration/3]
26 root [ksoftirqd/3]
29 root [kdevtmpfs]
30 root [netns]
32 root [khungtaskd]
33 root [oom_reaper]
34 root [writeback]
35 root [kcompactd0]
36 root [crypto]
37 root [kblockd]
38 root [watchdogd]
39 root [kworker/2:1-ipv]
40 root [rpciod]
41 root [kworker/u9:0]
42 root [xprtiod]
43 root [kswapd0]
44 root [nfsiod]
55 root [kthrotld]
56 root [iscsi_eh]
57 root [kworker/u8:1]
59 root [kworker/1:1-mm_]
60 root [DWC Notificatio]
61 root [vchiq-slot/0]
62 root [vchiq-recy/0]
63 root [vchiq-sync/0]
64 root [vchiq-keep/0]
65 root [SMIO]
66 root [kworker/0:2-eve]
67 root [irq/37-brcmstb_]
68 root [irq/38-mmc1]
69 root [irq/38-mmc0]
70 root [kworker/0:3-eve]
72 root [mmc_complete]
73 root [kworker/0:1H-mm]
74 root [kworker/3:1H-kb]
75 root [kworker/3:2H]
76 root [jbd2/mmcblk0p2-]
77 root [ext4-rsv-conver]
79 root [kworker/2:1H-kb]
80 root [kworker/1:1H-kb]
94 root /sbin/syslogd -n
98 root /sbin/klogd -n
123 root [kworker/2:2H]
124 root [ipv6_addrconf]
145 root -sh
164 root /sbin/getty -L tty1 0 vt100
169 root [kworker/3:0-eve]
170 root [kworker/3:1-mm_]
171 root [kworker/3:2]
172 root ps
#
Hormis les threads internes du noyau (toutes les tâches avec des noms entre crochets), nous observons la présence de seulement six processus :
init» : le premier
processus qui est chargé d’abord de l’initialisation du système depuis
l’espace utilisateur et par la suite de l’adoption des processus dont le
parent se termine ;
syslogd» et
«klogd» sont deux démons
chargés de l’enregistrement des messages du système ;
getty» : le service qui
attend les connexions sur le terminal tty1 (écran HDMI +
clavier USB). Je suis connecté sur la console série et le
«getty» correspondant a laissé sa place au
shell ;
sh» le shell sur
lequel nous sommes connectés et la commande
«ps» elle-même.
Voilà un système dont le contenu est bien sous contrôle !
Cette première image est très toutefois limitée, elle ne comprend
guère que Busybox, et le compte «root» est même
accessible sans mot de passe. Nous allons améliorer sa configuration.
Nous pouvons faire une toute une série d’améliorations, afin d’obtenir un
système un peu plus convivial, accueillant un autre utilisateur que
«root» par exemple ou renforçant la partition
principale contre les risques de coupures d’alimentation intempestives.
Nous relançons :
[build-pi4]$ make menuconfig
Et nous nous intéressons au menu «System configuration» comme nous le voyons sur la figure 11.
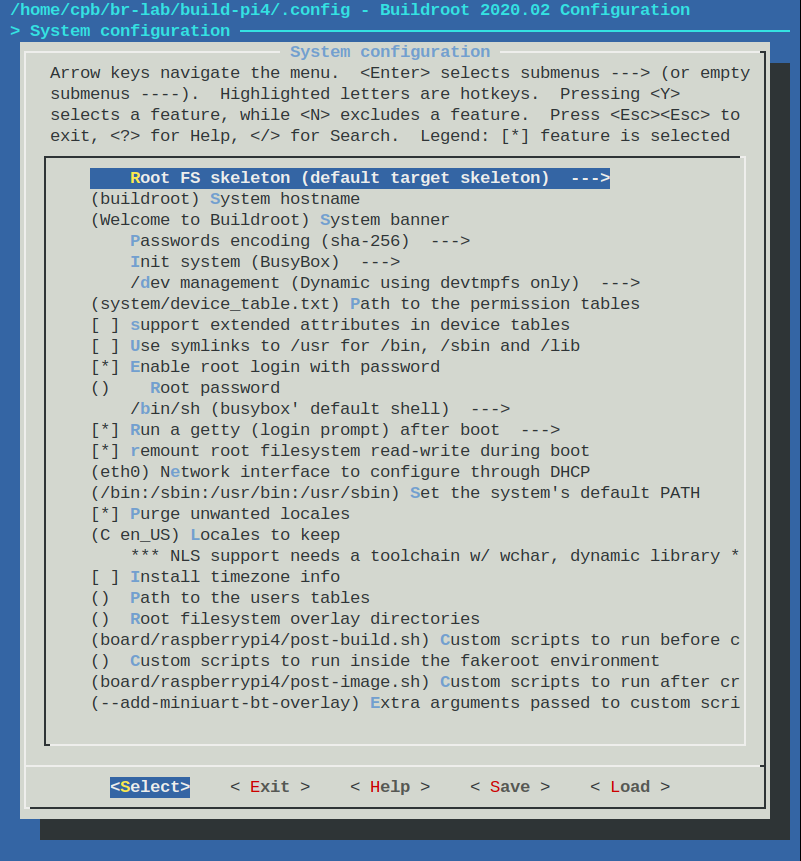
Intervenons sur quelques options de ce menu :
System hostname» :
choisissons un nom plus représentatif pour notre carte. Il apparaîtra
dans l’invite de connexion, et il est possible de l'afficher dans le
prompt du shell.R-Pi».
System banner» : cette
petite phrase s’affichera au démarrage avant la proposition de
connexion ; on peut la personnaliser à volonté. Sur la plupart des
systèmes que je configure, on affiche ainsi le nom du projet et celui de
mon client.Welcome on board!».
Enable root login with
password» : si le système a la moindre chance
de se retrouver connecté à Internet, il est préférable de désactiver
cette option. En effet le compte «root» sera le
premier visé par les attaques automatiques par force brute. Si cette
option est désactivée, il faudra intégrer la commande
«sudo» afin de pouvoir réaliser les opérations
d’administration.Root password» : de
même, il est conseillé de choisir pour tous les comptes des mots de
passe solides (longs, assez faciles à retenir mais difficiles à
deviner). Pour cette démonstration prenons un mot de passe ridiculement
simple.root».
Remount root filesystem read-write during
boot» : sur un système embarqué où
l’alimentation peut être coupée à tout moment, il est conseillé de
conserver le système de fichiers principal en lecture-seule. On le
basculera en lecture-écriture temporairement pour des modifications de
configuration par exemple.[ ]».
Network interface to configure through
DHCP» : suivant la situation, on utilisera ou
non une configuration réseau par DHCP. Si tel est le cas, on indique ici
le nom de l’interface Ethernet.eth0».
Path to the users
tables» : on indique ici le chemin d’accès
pour un fichier contenant la liste des utilisateurs.
Nous allons devoir fournir un fichier pour les utilisateurs supplémentaires
(autres que «root»). Ce sera notre premier fichier
de configuration personnalisé mais nous en ajouterons d'autres par la suite.
La méthode la plus adéquate à mon sens consiste à ajouter une arborescence
externe (external tree) regroupant tous nos fichiers personnels.
Quittons donc quelques instants le menu de configuration (en sauvegardant les modifications) pour créer le fichier des utilisateurs dans un external tree.
Une arborescence externe est un répertoire placé en-dehors
des sources de Buildroot et en-dehors du répertoire de compilation
«build-pi4» dans lequel nous pourrons ajouter des
recettes supplémentaires (pour intégrer des packages absents de ceux connus
par Buildroot, ou pour intégrer du code métier applicatif), des paramètres
de configuration pour Busybox ou pour le noyau, ou encore des fichiers
personnalisés à ajouter dans l'arborescence de la cible. Nous allons
commencer par un external tree très simple.
Remontons d'un cran dans notre système de fichiers, puis créons un
répertoire de notre choix. Par exemple
«pi4-config».
[build-pi4]$ cd .. [br-lab]$ mkdir pi4-config [br-lab]$ ls build-pi4 buildroot-2020.02.tar.bz2 pi4-config buildroot-2020.02 dl [br-lab]$ cd pi4-config/ [pi4-config]$
Pour que cette arborescence soit valide pour Buildroot, nous devons y créer trois fichiers :
external.desc» qui contient
le nom et la description de l'arborescence externe ;
external.mk» un fragment de
Makefile — initialement vide — indiquant comment compiler
les packages contenus dans cet external tree ;
Config.in» un fichier
décrivant les sous-menus à ajouter au menu de configuration
(initialement vide également).
[pi4-config]$ echo "name: PI4_CONFIG" > external.desc [pi4-config]$ echo "desc: Custom configuration for Pi 4" >> external.desc [pi4-config]$ cat external.desc name: PI4_CONFIG desc: Custom configuration for Pi 4 [pi4-config]$
[pi4-config]$ touch external.mk
[pi4-config]$ touch Config.in
Ajoutons un répertoire dans lequel nous stockerons nos éléments de configuration, à commencer par la table des utilisateurs.
[pi4-config]$ mkdir configs [pi4-config]$
Nous allons remplir «Path to the users
tables» avec le nom d’un fichier qui contient la
liste des utilisateurs. Il doit y avoir un compte par
ligne. Les champs, séparés par une espace,
sont les suivants :
root» ne doit pas être indiqué
dans ce fichier.
users».
=», chiffré sinon.
Si le mot de passe est «!», pas de connexion
possible (compte utilisé pour un démon système par exemple).
-» si on ne veut pas disposer de
répertoire personnel. C'est le cas lorsqu'un service doit s'exécuter
avec une identité autre que «root» sans
permettre de connexion.
/bin/sh» est le shell
«-» si aucun).
Je crée donc un fichier «configs/users.tbl» :
[pi4-config]$ echo "rpi 1000 rpi 1000 =rpi /home/rpi /bin/sh - Raspberry Pi User" > configs/users.tbl [pi4-config]$
Comme on le voit, j'ai ajouté un utilisateur «rpi»
appartenant à son propre groupe, et dont le mot de passe est...
«rpi» !
Le stockage du mot de passe en clair dans ce fichier de configuration est acceptable pour une expérimentation comme celle-ci mais doit être proscrit en environnement de production. En effet si la sécurité de la machine utilisée pour la compilation est compromise, c'est l'ensemble des systèmes déployés qui sont vulnérables
Pour que l'arborescence externe soit prise en considération, il va nous
falloir l'indiquer une fois sur la ligne de commande de «make
menuconfig» puis elle sera mémorisée automatiquement.
[pi4-config]$ cd ../build-pi4/ [build-pi4]$ export BR2_EXTERNAL=../pi4-config/ [build-pi4]$ make menuconfig
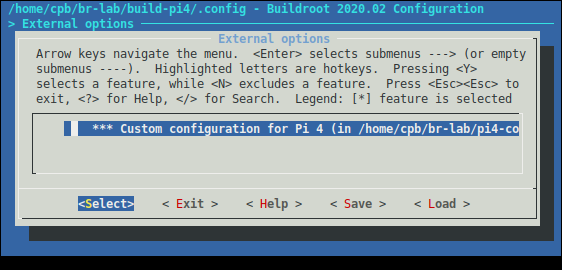
Une nouvelle ligne est apparue au bas du menu de configuration :
Comme nous n'avons pas indiqué de menu ou de packages supplémentaires, le sous-menu concerné indique seulement la description de cette option.
Ce qui nous intéresse pour le moment, c'est de renseigner la table des
utilisateurs. Nous pouvons donc donner le chemin dans le menu
«System configuration». J'utilise une variable
qui va être automatiquement créée par Buildroot :
«BR2_EXTERNAL_PI4_CONFIG_PATH».
Elle représente la racine de notre arborescence externe. Le nom de la
variable a été composé à partir du champ «name» que
nous avons inscrit dans le fichier «external.desc».
Le nom de l'external tree était
«PI4_CONFIG», celui de la variable est donc
«BR2_EXTERNAL_PI4_CONFIG_PATH».
Cette approche nous donne de la souplesse, il sera possible d'utiliser le même external tree dans d'autres builds. Nous verrons même comment extraire la configuration de Buildroot que nous réalisons pour la réutiliser avec une version ultérieure par exemple.
J'ai donc modifié l'option
«Path to the users tables»
du menu «System configuration» pour y inscrire la
chaîne :
«$(BR2_EXTERNAL_PI4_CONFIG_PATH)/configs/users.tbl».
Après sauvegarde, on relance la compilation du système :
[build-pi4]$ make
La durée est très courte, car il n'y a que quelques fichiers de paramétrage système à modifier.
Après réécriture de la carte micro-SD comme nous l'avons fait plus haut, nous pouvons démarrer le Raspberry Pi :
Welcome on board! R-Pi login:
Nous pouvons déjà remarquer la bonne prise en compte du message de bienvenue
et du nom d'hôte («R-Pi» au lieu de
«Buildroot» précédemment). Connectons-nous sous la
nouvelle identité ajoutée :
R-Pi login: rpi Password: (rpi) $ pwd /home/rpi $ exit
La connexion sur le nouveau compte a fonctionné, vérifions si
«root» est bien muni d'un mot de passe cette
fois :
Welcome on board! R-Pi login: root Password: (root) # pwd /root #
Nous avons placé le système de fichiers en lecture seulement, vérifions cela :
# echo HELLO > file.txt -sh: can't create file.txt: Read-only file system #
L'écriture est bien interdite. Nous pouvons toutefois remonter le système de fichiers en lecture-écriture :
# mount / -o remount,rw [ 73.376221] EXT4-fs (mmcblk0p2): re-mounted. Opts: (null) # echo HELLO > file.txt # ls file.txt #
Le message du kernel qui apparaît sur cette console après la
commande «mount» est normal, il nous annonce que la
partition a été remontée.
Nous pouvons aussi remettre le système de fichiers en lecture seule :
# mount / -o remount,ro [ 89.070566] EXT4-fs (mmcblk0p2): re-mounted. Opts: (null) # rm -f file.txt rm: can't remove 'file.txt': Read-only file system #
Le système est bien en lecture seule à nouveau. Notre système n'est plus vulnérable aux coupures d'alimentation électrique.
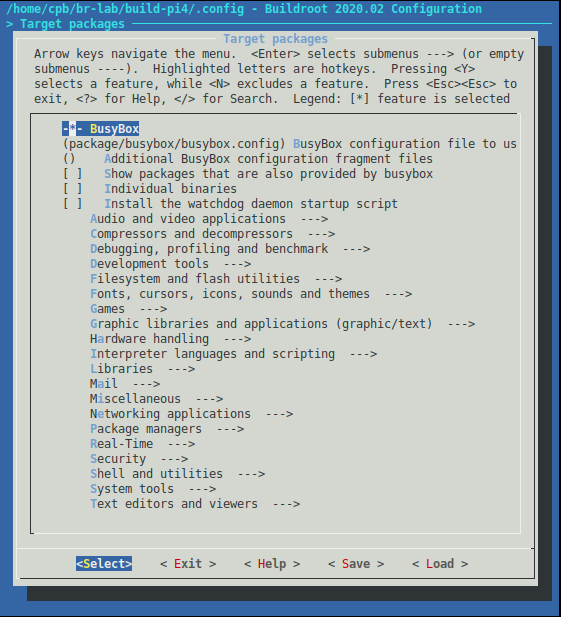
L'ajout de logiciels proposés par Buildroot est très simple, il suffit de se
rendre dans le menu «Target
packages» visible sur la figure 14, d'explorer ses
sous-menus et de piocher dans les applications proposées pour composer le
contenu de notre système.
Par exemple, dans le menu «Networking
applications» j'ajoute le serveur SSH
Dropbear :
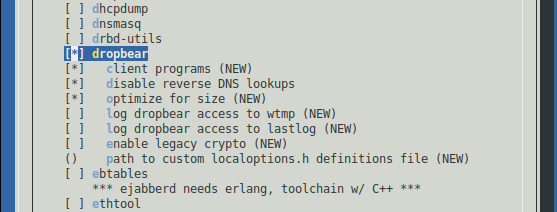
On peut remarquer sur la figure 15, que j'ai également coché l'option
«disable reverse DNS lookups» pour accélérer les
connexions.
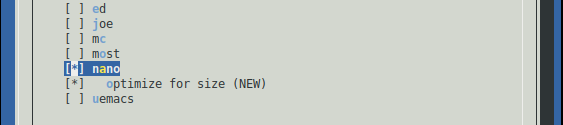
J'ai choisi également d'ajouter l'éditeur
Gnu Nano se
trouvant dans le sous-menu «Text editors and
viewers» comme on le voit sur la figure 16.
Nous avons précédemment vu comment remonter le système de fichiers,
initialement en lecture seule, pour y accéder en lecture-écriture puis le
replacer en lecture seule à nouveau. Ces commandes ne sont pas compliquées,
mais durant la phase de mise au point on peut être amené à les taper
plusieurs dizaines de fois par jour. J'ai donc l'habitude de créer deux
petits scripts, que j'appelle simplement
«rw» et
«ro», qui sont installés sur la
cible et permettent très rapidement de changer le mode d'accès à
l'arborescence.
Nous allons placer nos deux scripts dans une arborescence spécifique au sein de l'external tree créé plus haut. Ensuite nous indiquerons à Buildroot de venir ajouter le contenu de cette arborescence dans le système de fichiers de la cible.
Je crée un premier répertoire dans l'external tree, correspondant à la racine de mon arborescence :
[build-pi4]$ cd ../pi4-config/ [pi4-config]$ mkdir custom-rootfs
Je souhaite placer mes scripts dans le répertoire
«/usr/bin» de ma cible. Je crée donc ce repertoire
dans mon arborescence :
[pi4-config]$ mkdir -p custom-rootfs/usr/bin/
Puis j'y crée le script »rw»
[pi4-config]$ nano custom-rootfs/usr/bin/rw
Avec le contenu suivant :
#!/bin/sh mount / -o remount,rw
Et le script «ro» :
[pi4-config]$ nano custom-rootfs/usr/bin/ro
contenant :
#!/bin/sh mount / -o remount,ro
N'oublions pas de rendre les scripts exécutables :
[pi4-config]$ chmod +x custom-rootfs/usr/bin/*
Il faut indiquer à Buildroot la présence de cette nouvelle arborescence à
venir ajouter, superposer à celle d'origine. Il s'agit de l'entrée
«Root filesystem overlay
directories» du menu «System
configuration». Comme précédemment, on fait référence au
répertoire de l'external tree.
[pi4-config]$ cd ../build-pi4/ [build-pi4]$ make menuconfig
Je remplis donc l'entrée
«Root filesystem overlay
directories» ainsi :
$(BR2_EXTERNAL_PI4_CONFIG_PATH)/custom-rootfs
Lançons la nouvelle production d’image (qui ne dure que quelques dizaines de secondes, le temps de compiler Dropbear, Nano et de reconstruire l'image).
Welcome on board! R-Pi login: root Password: (root)
Vérifions si le serveur «dropbear» est bien démarré
et si la commande «nano» est présente :
# ps | grep drop 144 root /usr/sbin/dropbear -R 156 root grep drop # nano --version GNU nano, version 4.7 (C) 1999-2011, 2013-2019 Free Software Foundation, Inc. (C) 2014-2019 the contributors to nano Email: nano@nano-editor.org Web: https://nano-editor.org/ Compiled options: --enable-tiny --disable-nls --disable-utf8
Les packages que nous avons demandés sont bien présents. Le système de fichiers doit toujours être en lecture seulement, vérifions si notre script de passage en lecture-écriture fonctionne :
# touch my-file touch: my-file: Read-only file system # rw [ 244.951926] EXT4-fs (mmcblk0p2): re-mounted. Opts: (null) # touch my-file # ls my-file #
Parfait, revenons en lecture seule :
# ro [ 266.057973] EXT4-fs (mmcblk0p2): re-mounted. Opts: (null) # rm -f my-file rm: can't remove 'my-file': Read-only file system #
Notre système est bien sécurisé contre les coupures d'alimentation et il nous offre suffisament de souplesse pour intervenir dans le système de fichiers si besoin.
Nous n'avons pas encore utilisé le réseau. Si nous connectons un câble Ethernet avant de démarrer le Raspberry Pi, celui-ci peut obtenir directement une adresse IP si un serveur DHCP est présent sur le réseau local :
Welcome on board!
R-Pi login: root
Password: (root)
# ip addr
1: lo: >LOOPBACK,UP,LOWER_UP< mtu 65536 qdisc noqueue qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
2: eth0: >BROADCAST,MULTICAST,UP,LOWER_UP< mtu 1500 qdisc mq qlen 1000
link/ether dc:a6:32:02:57:3d brd ff:ff:ff:ff:ff:ff
inet 192.168.3.11/24 brd 192.168.3.255 scope global eth0
valid_lft forever preferred_lft forever
inet6 2a01:e0a:22:ea90:dea6:32ff:fe02:573d/64 scope global dynamic
valid_lft 86366sec preferred_lft 86366sec
inet6 fe80::dea6:32ff:fe02:573d/64 scope link
valid_lft forever preferred_lft forever
#
Il est toutefois des situations où l'on préfère utiliser une adresse
IP fixe. Pour cela, il faut modifier le fichier
«/etc/network/interfaces». De même, le serveur
DHCP fournit ici l'adresse du serveur DNS local. Nous pouvons en fixer un
statiquement dans «/etc/resolv.conf».
Le plus simple consiste à surcharger ces deux fichiers dans l'arborescence external tree :
[build-pi4]$ cd ../pi4-config/ [pi4-config]$ mkdir -p custom-rootfs/etc/network/ [pi4-config]$ nano custom-rootfs/etc/network/interfaces
Contenu du fichier «interfaces» (bien entendu
il faut l'ajuster selon la situation) :
auto lo iface lo inet loopback auto eth0 iface eth0 inet static address 192.168.3.200 netmask 255.255.255.0 gateway 192.168.3.254
[pi4-config]$ nano custom-rootfs/etc/resolv.conf
Contenu du fichier «resolv.conf» :
nameserver 1.1.1.1
Après avoir regénéré l'image, l'avoir copiée sur carte micro-SD et démarré le Raspberry Pi, je me connecte en SSH depuis mon PC :
[build-pi4]$ ssh root@192.168.3.200 The authenticity of host '192.168.3.200 (192.168.3.200)' can't be established. ECDSA key fingerprint is SHA256:sUFGwSyZCG/gWkEO4r9OmGgMFnZgs1LuT9fQgESIdTs. Are you sure you want to continue connecting (yes/no)? yes Warning: Permanently added '192.168.3.200' (ECDSA) to the list of known hosts. root@192.168.3.200's password: (root) # uname -a Linux R-Pi 4.19.97-v7l #1 SMP Sun Mar 8 23:43:48 CET 2020 armv7l GNU/Linux #
Je peux vérifier que le Raspberry Pi accède également à Internet :
# ping www.kernel.org PING www.kernel.org (136.144.49.103): 56 data bytes 64 bytes from 136.144.49.103: seq=0 ttl=53 time=17.657 ms 64 bytes from 136.144.49.103: seq=1 ttl=53 time=17.413 ms 64 bytes from 136.144.49.103: seq=2 ttl=53 time=17.844 ms ^C --- www.kernel.org ping statistics --- 3 packets transmitted, 3 packets received, 0% packet loss round-trip min/avg/max = 17.413/17.638/17.844 ms # wget https://www.kernel.org wget: not an http or ftp url: https://www.kernel.org # exit Connection to 192.168.3.200 closed. [build-pi4]$
Notre cible accède bien à Internet, mais nous ne pouvons pas télécharger une
page en utilisant le protocole HTTPS, la commande
«wget» n'acceptant que HTTP ou FTP.
La commande «wget» est implémentée en utilisant
l'utilitaire
Busybox.
Nous pouvons modifier la configuration de ce dernier avec une commande
particulière de Buildroot :
[build-pi4]$ make busybox-menuconfig
Un écran de configuration ressemblant à celui de Buildroot apparaît, visible sur la figure 17 :
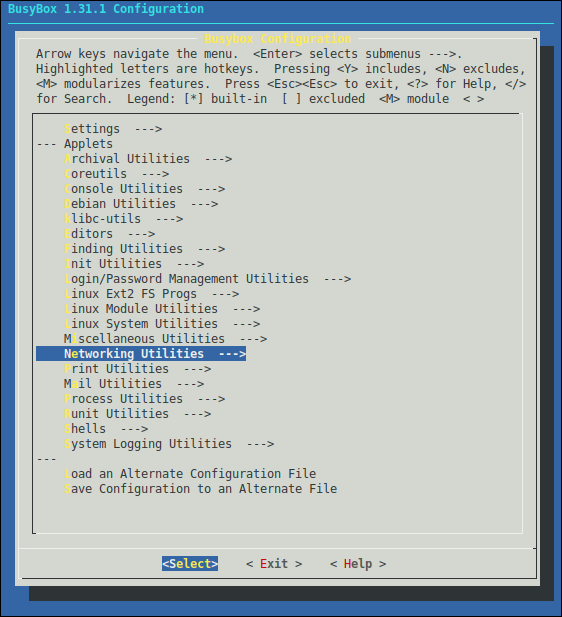
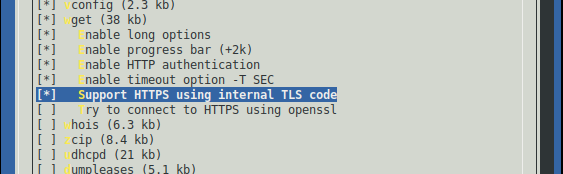
Je me rends dans le menu «Networking
Utilities» que l'on voit sur la figure 18, et je
valide l'option «Support HTTPS using internal TLS
code» pour l'application
«wget».
Bien entendu, on en profitera pour regarder les commandes implémentées dans Busybox, et en ajouter — ou en retirer — quelques unes suivant la destination du système embarqué.
Après compilation, installation et reboot du Raspberry Pi, nous observons :
# wget https://www.kernel.org Connecting to www.kernel.org (136.144.49.103:443) wget: note: TLS certificate validation not implemented wget: can't open 'index.html': Read-only file system #
Et oui, «wget» ne peux pas écrire dans le
répertoire courant puisque le système est en lecture seulement. Je me
déplace alors dans «/tmp» sur lequel est monté un
«tmpfs» (une sorte de ramdisk) utilisable
en écriture :
# cd /tmp # wget https://www.kernel.org Connecting to www.kernel.org (136.144.49.103:443) wget: note: TLS certificate validation not implemented saving to 'index.html' index.html 100% |********************************| 16749 0:00:00 ETA 'index.html' saved #
Tout s'est bien passé, «wget» a pu télécharger une
page en utilisant le protocole HTTPS.
Il est rare qu'un système embarqué soit composé uniquement d'applicatifs standards et de fichiers de configuration. Cela m'est arrivé lorsqu'il s'agissait de faire de petits serveurs pour des tâches simples (référence NTP, serveur DHCP, DNS local, etc.) mais ce n'est pas le cas le plus courant d'utilisation de Buildroot.
Si nous devons ajouter du code métier, il y a plusieurs approches possibles. Tout d'abord, pendant une phase de développement, nous allons devoir coder et tester notre projet indépendamment du BSP. Pour cela nous devons disposer de la toolchain produite par Buildroot.
Il est possible d'appeler directement le cross-compiler fourni par
Buildroot en appelant les exécutables
«arm-linux-gcc» ou
«arm-linux-g++» qui se trouvent dans le
sous-répertoire «host/bin/» de notre répertoire de
travail.
[build-pi4]$ host/bin/arm-linux-gcc --version arm-linux-gcc.br_real (Buildroot 2020.02) 8.3.0 Copyright © 2018 Free Software Foundation, Inc. Ce logiciel est un logiciel libre; voir les sources pour les conditions de copie. Il n'y a AUCUNE GARANTIE, pas même pour la COMMERCIALISATION ni L'ADÉQUATION À UNE TÂCHE PARTICULIÈRE. [build-pi4]$
Toutefois ceci peut s'avérer gênant si le développeur applicatif est dans une équipe différente de celle du concepteur du BSP. Pour cela, Buildroot nous permet d'extraire la toolchain et de l'installer sur une autre machine.
On appelle :
[build-pi4]$ make sdk
qui nous fournit une archive :
[build-pi4]$ ls images/ arm-buildroot-linux-uclibcgnueabihf_sdk-buildroot.tar.gz rootfs.ext4 bcm2711-rpi-4-b.dtb rpi-firmware boot.vfat sdcard.img rootfs.ext2 zImage
Nous pouvons copier cette archive sur une autre machine ou à un endroit
plus approprié de la même machine, et l'extraire. Par exemple je vais la
placer dans «/opt/» sur mon poste.
[build-pi4]$ sudo tar xf images/arm-buildroot-linux-uclibcgnueabihf_sdk-buildroot.tar.gz -C /opt/ [build-pi4]$ ls /opt/ arm-buildroot-linux-uclibcgnueabihf_sdk-buildroot picomono picoscope poky sublime_text [build-pi4]$
On peut raccourcir le nom du répertoire :
[build-pi4]$ sudo mv /opt/arm-buildroot-linux-uclibcgnueabihf_sdk-buildroot/ /opt/cross-br-2020.02 [build-pi4]$ ls /opt/cross-br-2020.02/ arm-buildroot-linux-uclibcgnueabihf include libexec share bin lib relocate-sdk.sh usr etc lib64 sbin
Puis il faut appeler le script
«relocate-sdk» se trouvant dans ce
répertoire pour qu'il enregistre le nouvel emplacement. Il faut l'invoquer
avec les droits suffisants pour pouvoir écrire dans les fichiers concernés.
[build-pi4]$ sudo /opt/cross-br-2020.02/relocate-sdk.sh Relocating the buildroot SDK from /home/cpb/br-lab/build-pi4/host to /opt/cross-br-2020.02 ... [build-pi4]$
N'importe quel utilisateur peut alors appeler le cross-compiler.
[build-pi4]$ /opt/cross-br-2020.02/bin/arm-linux-g++ --version arm-linux-g++.br_real (Buildroot 2020.02) 8.3.0 Copyright © 2018 Free Software Foundation, Inc. Ce logiciel est un logiciel libre; voir les sources pour les conditions de copie. Il n'y a AUCUNE GARANTIE, pas même pour la COMMERCIALISATION ni L'ADÉQUATION À UNE TÂCHE PARTICULIÈRE. [build-pi4]$
Supposons par exemple que nous souhaitions compiler un exécutable comme celui-ci :
// hello-direct.cpp
#include <iostream>
int main()
{
std::cout << "Hello World! (direct call to the cross-compiler)";
std::cout << std::endl;
return 0;
}
Nous pouvons appeler le cross-compiler
«arm-linux-g++» directement
en ajoutant son emplacement dans la variable «PATH»
de notre session shell.
[build-pi4]$ PATH=$PATH:/opt/cross-br-2020.02/bin/ [build-pi4]$ arm-linux-g++ hello-direct.cpp -o hello-direct -Wall
Ce fichier peut être transféré avec «scp» sur notre
cible ou placé dans l'arborescence de notre external tree. Je
choisis cette seconde solution. Elle nécessite bien sûr un rebuild
de l'image.
[build-pi4]$ cp hello-direct ../pi4-config/custom-rootfs/usr/bin/ [build-pi4]$ make
Welcome on board! R-Pi login: root Password: (root) # hello-direct Hello World! (direct call to the cross-compiler)
Naturellement, il est possible d'invoquer le compilateur au travers d'un
«Makefile» en remplissant les variables
d'environnement adéquante (souvent
«CROSS_COMPILE»).
La meilleure manière d'intégrer un projet disposant d'une structure de
compilation comme «automake»,
«Cmake» ou même un simple
«Makefile» est d'écrire une
recette que nous ajouterons dans notre external tree et
que Buildroot se chargera de produire avec le reste de l'image.
Il y a de très nombreuses recettes fournies avec Buildroot dans le
répertoire «package/» de ses
sources, elles peuvent servir d'exemples pour compiler des applications
supplémentaires.
Prenons un premier exemple, nous souhaitons installer un package qui se compile avec les Autools.
Nous créons dans notre external tree un répertoire qui accueillera
les différentes recettes que nous souhaitons ajouter. Pour être cohérent
avec l'organisation de Buildroot, je le nomme
«package».
[build-pi4]$ cd ../pi4-config/ [pi4-config]$ mkdir package [pi4-config]$
Dans ce répertoire nous créons un sous-répertoire dédié au projet concerné.
Je vais prendre le package
«hello-autotools» que j'avais écrit en exemple de
mon
cours
en ligne sur Yocto Project.
[pi4-config]$ mkdir package/hello-autotools
Dans ce répertoire nous devons créer trois fichiers :
Config.in» : l'entrée de
menu pour sélectionner le package lors de la compilation de
l'image.
hello-autotools.mk» : la
recette de compilation du package.
hello-autotools.hash» :
un fichier contenant des sommes de contrôles pour les éléments
téléchargés.
Voici le contenu du premier fichier,
«package/hello-autotools/Config.in» :
config BR2_PACKAGE_HELLO_AUTOTOOLS
bool "hello-tools"
help
This is an example of a package built with the autotools.
A présent, voici la recette de compilation
«package/hello-autotools/hello-autotools.mk».
Du fait que nous employons le mécanisme des autotools elle est très
simple et se borne à indiquer la provenance du package.
################################################################################ # # hello-autotools # ################################################################################ HELLO_AUTOTOOLS_VERSION = 1.0 HELLO_AUTOTOOLS_SOURCE = hello-autotools-$(HELLO_AUTOTOOLS_VERSION).tar.bz2 HELLO_AUTOTOOLS_SITE = https://www.blaess.fr/christophe/yocto-lab/files HELLO_AUTOTOOLS_AUTORECONF = YES HELLO_AUTOTOOLS_LICENSE = GPL-2.0 $(eval $(autotools-package))
Dès qu'il y a un téléchargement de package, il est conseillé de
vérifier une somme de contrôle. Pour cela, on emploie l'utilitaire
«sha256sum» et l'on inscrit la checksum
dans le fichier
«package/hello-autotools/hello-autotools.hash».
sha256 ad06e44345fc85e061932da4bdda964c65f1dc56fbc07ea03ea8b93c68065cfe hello-autotools-1.0.tar.bz2
Notre recette de compilation pour le package est prête. Mais elle ne sera
intégrée par Buildroot que si nous lui indiquons où elle se trouve. Pour
cela nous éditons le fichier
«external.mk» à la racine de notre
external tree (fichier précédemment vide) et ajoutons la ligne
suivante :
include $(sort $(wildcard $(BR2_EXTERNAL_PI4_CONFIG_PATH)/package/*/*.mk))
Cette ligne demande à Buildroot d'explorer toutes les recettes se trouvant
dans le sous-répertoire «package» de notre
external tree.
Enfin nous ajoutons dans le fichier
«Config.in» de notre
external tree (précédemment vide également) les lignes
suivantes qui y définissent un menu incluant le
«Config.in» de notre package.
menu "Custom packages" source "$BR2_EXTERNAL_PI4_CONFIG_PATH/package/hello-autotools/Config.in" endmenu
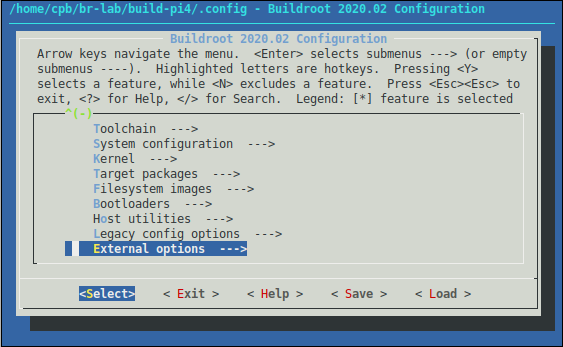
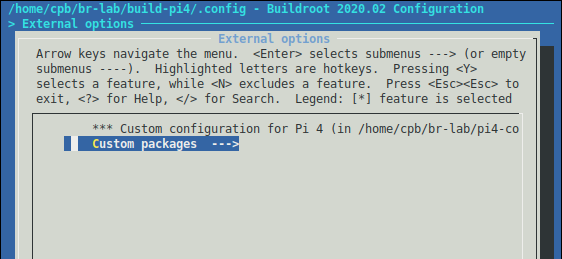
Lorsque nous relançons la commande
«make menuconfig» de Buildroot, le menu
«External options» s'est rempli, comme nous
le voyons sur la figure 19.
[pi4-config]$ cd ../build-pi4/ [build-pi4]$ make menuconfig
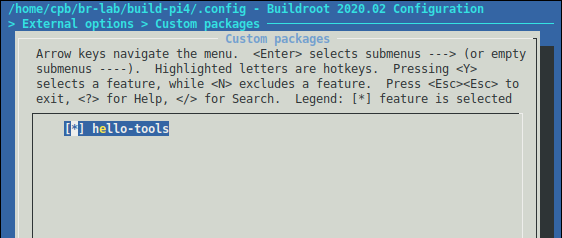
Dans ce nouveau menu, nous voyons notre option
«hello-tools» comme on le voit sur la figure 20.
Bien sûr, j'active cette option avant de relancer le build.
Pendant la construction du système, on voit passer brièvement les messages indiquant le téléchargement, l'extraction et la compilation de notre package.
Vérifions sa présence sur la cible :
R-Pi login: root Password: (root) # hello-autotools Hello from R-Pi (built with autotools) #
De la même façon, j'ai ajouté des recettes pour compiler un package
utilisant CMake ou avec
un simple «Makefile» classique. Je ne les détaille
pas ici, ils se trouvent dans l'archive que l'on trouvera plus loin.
Buildroot utilise de préférence un mécanisme de lancement des services au
démarrage basé sur le processus «init» à la mode
System V fourni par «Busybox».
Il est toujours possible, dans le sous-menu «Init
system» du menu «System
configuration», de choisir un démarrage avec
«systemd» mais on l'évite généralement car la
maîtrise de la séquence d'initialisation des services est plus simple avec
les scripts System V.
Si on veut lancer une application au démarrage, il nous suffit
d'ajouter un script dans le répertoire «etc/init.d»
de la cible dont le nom commence par un «S» suivi
d'un numéro d'ordre de démarrage. Ce script sera appelé au boot du
système avec l'argument «start» et à l'arrêt du
système avec l'argument «stop».
Voici ce que contient le répertoire «etc/init.d»
initial :
# ls /etc/init.d/ S01syslogd S02sysctl S40network rcK S02klogd S20urandom S50dropbear rcS #
J'ajoute un script de lacement dans l'arborescence de l'external tree :
[build-pi4]$ mkdir ../pi4-config/custom-rootfs/etc/init.d [build-pi4]$ nano ../pi4-config/custom-rootfs/etc/init.d/S60hello
Le contenu de ce fichier est le suivant :
#!/bin/sh
if [ "$1" = "start" ]
then
/usr/bin/hello-autotools &
fi
Ce script est très simple car il ne fait que lancer une commande. Il y a des
situations où il est plus complexe car il faut arrêter le service lors du
shutdown du système. J'ai placé un «&»
à la fin de la commande, cela n'a aucune utilité ici puisqu'elle se termine
immédiatement, mais pourrait servir dans le cas d'une application qui reste
en fonction de manière prolongée car le script doit rendre la main une fois
le programme démarré.
Il ne faut pas oublier de le rendre exécutable :
[build-pi4]$ chmod +x ../pi4-config/custom-rootfs/etc/init.d/S60hello
Une fois le système recompilé et installé, on vérifie les traces de boot du Raspberry Pi :
random: dropbear: uninitialized urandom read (32 bytes read) OK Hello from R-Pi (built with autotools) Welcome on board! R-Pi login:
Notre processus a donc bien été lancé automatiquement au boot.
Notre système fonctionne de manière plutôt satisfaisante :
Welcome on board! R-Pi login: rpi Password: (rpi) $ hello-autotools Hello from R-Pi (built with autotools) $ hello-cmake Hello from R-Pi (built with CMake) $ hello-makefile Hello from R-Pi (build with standard Makefile)
Un petit problème survient si on souhaite écrire dans un fichier :
$ hello-makefile > my-file.txt -sh: can't create my-file.txt: Read-only file system
C'est normal, la partition système est en lecture seulement, nous avons écrit un script pour y remédier :
$ rw mount: you must be root $
Voilà un véritable problème. Nous avons protégé notre partition système en
la plaçant en lecture seule. Pour pouvoir y faire quand même des
modifications, nous avons prévu des scripts «rw» et
«ro» (en étant conscient que pendant la période où
le système est en lecture-écriture, une coupure d'alimentation peut lui ètre
fatale). Mais ces scripts ne peuvent être appelés que par
«root», pas par un utilisateur (ou une application
métier) s'exécutant sous une identité quelconque.
D'autre part, on sent bien que le fait de mettre temporairement la partition système en lecture-écriture est un risque. Si une coupure d'alimentation survient juste à ce moment le système de fichiers peut être corrompu. Et la probabilité que l'utilisateur débranche et rebranche le système juste après avoir fait une modification de configuration pour voir si elle a été prise en compte est assez élevée.
Si nous souhaitons pouvoir sauvegarder des données d'application ou des éléments de paramétrage, il va falloir envisager l’ajout d’une partition supplémentaire montée en lecture-écriture à côté de la partition système.
Cette partition peut être formatée en «vfat»,
système de fichiers simple et robuste qui résiste plutôt bien à des coupures
d’alimentations pendant une écriture.
Il faut indiquer la présence de cette partition dans le fichier
«/etc/fstab». Nous allons
récupérer le fichier original produit par Buildroot (qui se trouve dans le
sous-répertoire «target/etc/» de notre dossier de
compilation), le copier dans notre external tree et lui ajouter une
ligne pour cette nouvelle partition.
[build-pi4]$ cp target/etc/fstab ../pi4-config/custom-rootfs/etc/ [build-pi4]$ nano ../pi4-config/custom-rootfs/etc/fstab
Le fichier est modifié ainsi (dernière ligne ajoutée) :
# <file system> <mount pt> <type> <options> <dump> <pass> /dev/root / ext2 ro,noauto 0 1 proc /proc proc defaults 0 0 devpts /dev/pts devpts defaults,gid=5,mode=620,ptmxmode=0666 0 0 tmpfs /dev/shm tmpfs mode=0777 0 0 tmpfs /tmp tmpfs mode=1777 0 0 tmpfs /run tmpfs mode=0755,nosuid,nodev 0 0 sysfs /sys sysfs defaults 0 0 /dev/mmcblk0p3 /home/rpi vfat defaults,uid=1000,gid=1000 0 0
Cette nouvelle partition sera montée directement sur
«/home/rpi», elle appartiendra toute entière à
l'utilisateur «rpi» créé précédemment, et sera
accessible en lecture et écriture.
Pour créer les partitions et l’image «sdcard.img»
finale, Buildroot appelle le script
«board/raspberrypi4/post-image.sh»
qui est indiqué dans l’option «Custom scripts to run after
creating filesystem images» du menu «System
configuration».
Ce script fait appel à un utilitaire nommé
«genimage» en lui passant le
fichier de configuration
«board/raspberrypi4/genimage-raspberrypi4.cfg».
Pour personnaliser cette étape, je vais copier ces deux fichiers dans l'external path en respectant la même structure de sous-dossiers, et les personnaliser ensuite.
[build-pi4]$ cd ../pi4-config/ [pi4-config]$ mkdir -p board/raspberrypi4/ [pi4-config]$ cp ../buildroot-2020.02/board/raspberrypi4/post-image.sh board/raspberrypi4/ [pi4-config]$ cp ../buildroot-2020.02/board/raspberrypi4/genimage-raspberrypi4.cfg board/raspberrypi4/
Le script «post-image.sh» fait
référence à son propre emplacement dans l'arborescence pour chercher le
fichier de description des partitions. Il n'est donc pas nécessaire de le
modifier, juste de le placer dans l'external tree.
J'édite le fichier de configuration
«genimage-raspberrypi4.cfg» et
j'ajoute les lignes en surbrillance :
[pi4-config]$ nano board/raspberrypi4/genimage-raspberrypi4.cfg
image boot.vfat {
vfat {
files = {
"bcm2711-rpi-4-b.dtb",
"rpi-firmware/cmdline.txt",
"rpi-firmware/config.txt",
"rpi-firmware/fixup4.dat",
"rpi-firmware/start4.elf",
"rpi-firmware/overlays",
"zImage"
}
}
size = 32M
}
image pi-home.vfat {
name = "pi-home.vfat"
vfat {
files = { }
}
empty = true
size = 128M
}
image sdcard.img {
hdimage {
}
partition boot {
partition-type = 0xC
bootable = "true"
image = "boot.vfat"
}
partition rootfs {
partition-type = 0x83
image = "rootfs.ext4"
}
partition pi-home.vfat {
partition-type = 0xC
image = "pi-home.vfat"
}
}
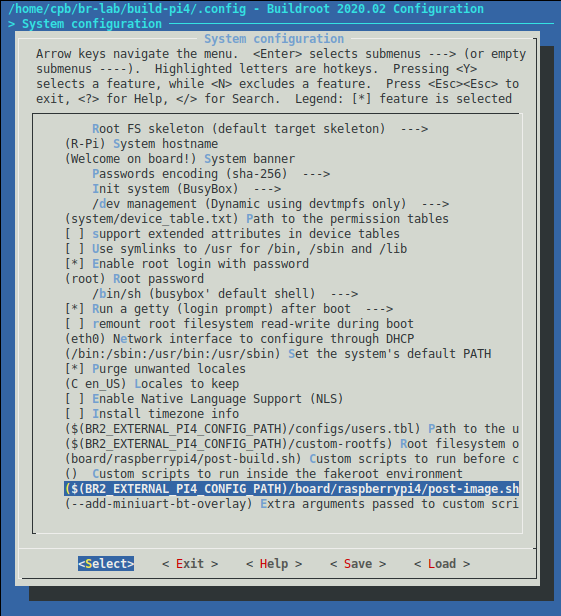
Avant de relancer la génération d'une image, il faut indiquer à Buildroot de
venir chercher le script dans notre external tree plutôt que dans
le répertoire initial. Ceci se configure dans l'option «Custom
scripts to run after creating filesystem image» (avant-dernière
ligne) du menu «System configuration» comme on le
voit sur la figure 21.
[pi4-config]$ cd ../build-pi4/ [build-pi4]$ make menuconfig
Après installation, nous vérifions si l'utilisateur
«rpi» a bien accès à son répertoire personnel en
lecture et écriture :
Welcome on board! R-Pi login: rpi Password: (rpi) $ pwd /home/rpi $ echo hello > my-file $ cat my-file hello $exit
Vérifions que la partition système est seulement accessible en lecture, même
pour l'utilisateur «root» :
Welcome on board! R-Pi login: root Password: (root) # pwd /root # echo hello > my-file -sh: can't create my-file: Read-only file system #
Notre image est ainsi robuste et insensible aux coupures
d'alimentation en ce qui concerne son arborescence système. La partition
utilisateur permet d'enregistrer des données, et en cas d'arrêt brutal
seules les données en cours d'écriture seront perdues, le système
«vfat» étant assez résilient.
Afin de pouvoir aisément réutiliser notre configuration dans un build pour une autre cible par exemple — ou pour la prochaine version de Buildroot — nous allons sauvegarder cette configuration dans notre external tree.
La configuration de Busybox est sauvegardée dans un fichier
«.config» ressemblant à celui de Buildroot ou du
kernel. Ce fichier se trouve dans le sous-répertoire
dans lequel Buildroot a fait la compilation de Busybox :
[build-pi4]$ ls -a build/busybox-1.31.1/ . editors networking .. examples NOFORK_NOEXEC.lst applets .files-list.txt NOFORK_NOEXEC.sh applets_sh findutils printutils .applied_patches_list include procps arch .indent.pro qemu_multiarch_testing archival init README AUTHORS INSTALL runit busybox .kconfig.d scripts busybox.links .kernelrelease selinux busybox_unstripped klibc-utils shell .busybox_unstripped.cmd libbb size_single_applets.sh busybox_unstripped.map libpwdgrp .stamp_dotconfig busybox_unstripped.out LICENSE .stamp_downloaded .config loginutils .stamp_extracted Config.in mailutils .stamp_kconfig_fixup_done .config.old Makefile .stamp_patched configs Makefile.custom sysklogd console-tools Makefile.flags testsuite coreutils Makefile.help .tmp_versions debianutils make_single_applets.sh TODO docs miscutils TODO_unicode e2fsprogs modutils util-linux [build-pi4]$
Nous copions ce fichier dans notre external tree en lui donnant un nom un peu plus explicite :
[build-pi4]$ cp build/busybox-1.31.1/.config ../pi4-config/configs/busybox.config [build-pi4]$
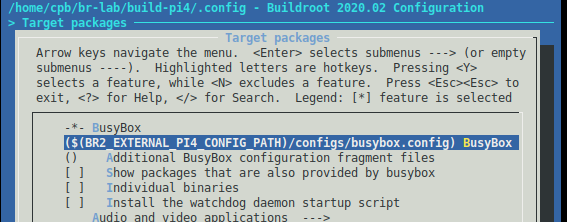
Et nous indiquons à Buildroot où trouver ce fichier de configuration. Pour
cela, nous nous rendons en haut de son menu «Target
packages» et remplissons l'option «Busybox
configuration file to use?» (la deuxième ligne) avec la
chaîne
«$(BR2_EXTERNAL_PI4_CONFIG_PATH)/configs/busybox.config»
comme on le voit sur la figure 22.
La même méthode pourrait s'appliquer à la configuration du kernel,
à laquelle on peut accéder avec la commande
«make linux-menuconfig» et dont la configuration
est enregistrée dans le fichier
«build/linux-custom/.config».
Il est possible de sauver la configuration de Buildroot lui-même dans notre external tree afin de pouvoir la réutiliser ultérieurement sous forme de defconfig et regénérer le système sur une autre machine par exemple.
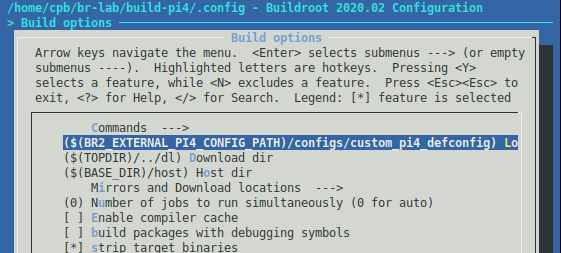
Tout d'abord nous allons indiquer à Buildroot l'emplacement de la sauvegarde
en utilisant l'option
«Location to save buildroot config» du menu
«Build options» (deuxième ligne). Nous donnons
le chemin vers le répertoire «configs» de notre
external tree. Le nom du fichier se termine par
«_defconfig» pour pouvoir l'utiliser comme
configuration par défaut. Nous apercevons le chemin et le nom sur la figure
23, je l'ai appelé «custom_pi4_defconfig :
Une fois cette opération réalisée, il nous suffit de demander à Buildroot de sauver les élements essentiels de sa configuration ainsi :
[build-pi4]$ make savedefconfig GEN /home/cpb/br-lab/build-pi4/Makefile [build-pi4]$ ls ../pi4-config/configs/ busybox.config custom_pi4_defconfig users.tbl [build-pi4]$
Maintenant que notre configuration par défaut est enregistrée dans notre external tree, celui-ci contient :
Il s'agit uniquement de données textuelles (configuration, recettes, etc) que l'on peut versionner avec Git par exemple.
On peut surtout transmettre cet external tree à un autre développeur — c'est ce que je fais pour mes clients — pour qu'il puisse regénérer le système à l'identique. Il lui faudra juste lancer une ligne un petit peu complexe détaillé plus bas.
Je vais tester que tout se passe bien. Commençons par effacer toute la compilation faite sur cette machine et télécharger notre external tree que l'on peut trouver ici :
https://www.blaess.fr/christophe/buildroot-lab/pi4-config.tar.bz2
br-lab]$ ls build-pi4 buildroot-2020.02 buildroot-2020.02.tar.bz2 dl pi4-config [br-lab]$ chmod -R +w buildroot-2020.02 [br-lab]$ rm -rf build-pi4/ pi4-config/ buildroot-2020.02/ [br-lab]$ ls buildroot-2020.02.tar.bz2 dl
Puis je recommence à zéro le build en utilisant notre configuration par défaut personnalisée :
[br-lab]$ tar xf buildroot-2020.02.tar.bz2 [br-lab]$ chmod -R -w buildroot-2020.02 [br-lab]$ ls buildroot-2020.02 buildroot-2020.02.tar.bz2 dl [br-lab]$ wget https://www.blaess.fr/christophe/buildroot-lab/pi4-config.tar.bz2 [...] [br-lab]$ tar xf pi4-config.tar.bz2 [br-lab]$ ls buildroot-2020.02 buildroot-2020.02.tar.bz2 dl pi4-config pi4-config.tar.bz2 [br-lab]$ cd buildroot-2020.02/
Voici la commande un peu complexe, qui joue trois rôles : demander à Buildroot d'utiliser un external tree, de compiler le code dans un répertoire de travail indépendant de ses sources, et d'utiliser la configuration que nous avons sauvegardée précédemment :
[buildroot-2020.02]$ make O=../build-pi4 BR2_EXTERNAL=../pi4-config/ custom_pi4_defconfig [...] # # configuration written to /home/cpb/br-lab/build-pi4/.config # [buildroot-2020.02]$
Il ne nous reste plus qu'à relancer la compilation, et attendre quelques dizaines de minutes :
cd ../build-pi4/ [buildroot-2020.02]$ cd ../build-pi4/ [build-pi4]$ make
Nous avons ainsi réussi à obtenir un système robuste, dont le contenu est parfaitement maîtrisé dans lequel nous pouvons ajouter à notre gré des applicatifs standards (il y a des centaines de packages disponibles directement avec Buildroot) et notre code métier.
L'utilisation d'un external path est un peu complexe à prendre en main mais permet de garantir la réutilisabilité de la configuration pour une autre plateforme cible, pour un autre poste de build ou pour une version ultérieure de Buildroot.
Il y a de nombreux points que nous n'avons pas abordés, comme la mise à jour du système, l'utilisation d'un bootloader (U-Boot, Barebox...), la modification du device tree, l'utilisation d'un noyau temps réel, la création de patches pour des applications ou pour le kernel, etc. Ils feront peut-être l'objet d'articles ultérieurs...
Si vous préférez être conseillés pour la conception de votre système embarqué avec Buildroot, je propose un accompagnement technique et des sessions de formation consacrées à ce sujet chez Logilin.

Ce document est placé sous licence Creative Common CC-by-nc. Vous pouvez copier son contenu et le réemployer à votre gré pour une utilisation non-commerciale. Vous devez en outre mentionner sa provenance.