Après l’étude des outils disponible en ligne de commande pour piloter des lignes GPIO (partie 1), puis celles de l’accès depuis un programme avec l’appel système ioctl() ou la version context-less de la bibliothèque Libgpiod (partie 2), nous poursuivons en examinant les fonctions bas niveaux de cette bibliothèque. Nous aborderons également le thème des performances d’accès aux GPIO selon la méthode choisie.
PROGRAMMATION AVEC LA BIBLIOTHÈQUE LIBGPIOD
Les fonctions context-less, nous l’avons vu, permettent un accès simple et rapide aux lignes GPIO pour la lecture. L’écriture aussi reste simple tant que nous souhaitons piloter une seule ligne pour sortir une impulsion ou un signal périodique. Si on souhaite gérer plusieurs lignes GPIO avec des valeurs déterminées dynamiquement (par exemple pour commander des relais en fonction de mesures obtenues par certains capteurs ou de demandes d’un opérateur), cette API context-less devient complexe d’usage.
De plus, pour certaines applications il peut être nécessaires de connaître des paramètres précis des lignes GPIO, par exemple le type de configuration de sortie (collecteur ouvert, drain ouvert, etc.). Pour cela nous préférerons utiliser l’API bas-niveau de Libgpiod.
Tous les exemples décrits ci-dessous sont disponibles dans mon dépôt Framagit : https://framagit.org/cpb/example-programs-using-libgpiod.
Structures de données
Nous manipulerons plusieurs types de données opaques, définis et gérés de manière interne dans la bibliothèque mais auxquels nous ne ferons référence que par des pointeurs :
struct gpiod_chip: un contrôleur de GPIO. Il nous permettra d’avoir accès à ses différentes lignes.struct gpiod_line: une ligne GPIO, identifié par un offset au sein de son contrôleur.struct gpiod_line_bulk: un groupe de lignes GPIO auxquelles on applique des opérations.struct gpiod_chip_iter: un itérateur permettant de parcourir les différents contrôleurs disponibles.struct gpiod_line_iter: un itérateur pour parcourir les lignes d’un contrôleur.
Liste des contrôleurs et lignes disponibles
L’accès à un contrôleur GPIO se fait en ouvrant le descripteur correspondant. On utilise l’une des fonctions suivantes :
struct gpiod_chip *gpiod_chip_open(const char *path);
// ex: chip = gpiod_chip_open("/dev/gpiochip2");
struct gpiod_chip *gpiod_chip_open_by_name(const char *name);
// ex: chip = gpiod_chip_open_by_name("gpiochip2");
struct gpiod_chip *gpiod_chip_open_by_number(unsigned int number);
// ex: chip = gpio_chip_open_by_number(2);
struct gpiod_chip *gpiod_chip_open_by_label(const char *label);
// ex: chip = gpio_chip_open_by_label("pinctrl-bcm2835");
// See device tree or kernel driver.
Ou la fonction générique suivante, qui recherche la plus adéquate des précédentes :
struct gpiod_chip *gpiod_chip_open_lookup(const char *string);
On peut également utiliser un itérateur pour parcourir les contrôleurs disponibles avec les fonctions :
struct gpiod_chip_iter *gpiod_chip_iter_new(void);
struct gpiod_chip *gpiod_chip_iter_next(struct gpiod_chip_iter *iter);
void gpiod_chip_iter_free(struct gpiod_chip_iter *iter);
void gpiod_chip_iter_free_noclose(struct gpiod_chip_iter *iter);
Si aucun argument n’est fourni sur sa ligne de commande, le programme list-gpio-lines.c parcourt tous les contrôleurs disponibles ainsi :
struct gpiod__chip_iter *iter;
struct gpio_chip *chip;
[...]
iter = gpiod_chip_iter_new();
if (iter == NULL)
[...]
while ((chip = gpiod_chip_iter_next(iter)) != NULL)
list_gpio_lines(chip);
gpiod_chip_iter_free(iter);
Si, au contraire, on lui fournit des arguments sur sa ligne de commande il tente d’ouvrir le(s) contrôleur(s) ainsi :
for (i = 1; i < argc; i ++) {
chip = gpiod_chip_open_lookup(argv[i]);
if (chip == NULL)
perror(argv[i]);
else
list_gpio_lines(chip);
}
Une fois un contrôleur ouvert, on peut connaître son nom, son label et son nombre de lignes avec les routines :
const char * gpiod_chip_name(struct gpiod_chip *chip);
const char * gpiod_chip_label(struct gpiod_chip *chip);
unsigned int gpiod_chip_num_lines(struct gpiod_chip *chip);
Pour accéder aux lignes GPIO d’un contrôleur, nous avons plusieurs possibilités. Tout d’abord on peut réclamer une ligne donnée par son numéro (son offset) :
struct gpiod_line *gpio_chip_get_line(struct gpiod_chip *chip,
unsigned int offset);
On peut aussi réclamer un ensemble (bulk) de lignes en passant un tableau d’offsets à la fonction :
int gpiod_chip_get_lines(struct gpiod_chip *chip,
unsigned int *offset,
int num_offset,
struct gpiod_line_bulk *bulk);
La structure gpiod_line_bulk qui est renseignée par cette fonction est de la forme :
struct gpiod_line_bulk {
struct gpiod_line *lines[GPIOD_LINE_BULK_MAX_LINES];
unsigned int num_lines;
};
Le champ num_lines indique le nombre de lignes inscrites dans le tableau lines. Il est toutefois possible d’itérer sur un ensemble bulk directement avec les macros :
struct gpiod_line_bulk bulk;
struct gpiod_line *line;
struct gpiod_line **save;
[...]
gpiod_line_bulk_foreach_line(&bulk, line, save) {
[...]
}
ou
struct gpiod_line_bulk bulk;
struct gpiod_line *line;
int offset;
[...]
gpiod_line_bulk_foreach_line_off(&bulk, line, offset) {
[...]
}
On peut également demander un tableau contenant toutes les lignes GPIO du contrôleur avec :
int gpiod_chip_get_all_lines(struct gpiod_chip *chip,
struct gpiod_line_bulk *bulk);
Et enfin, il est possible de rechercher une ou plusieurs lignes par leur noms :
struct gpiod_line *gpiod_find_line(struct gpiod_chip *chip,
const char *name);
int gpiod_find_lines(struct gpiod_chip *chip,
const char **names,
struct gpiod_line_bulk *bulk);
La liste de nom fournie à gpiod_find_lines() doit se terminer par un pointeur NULL.
Les informations sur une ligne peuvent être consultées avec les fonctions suivantes :
unsigned int gpiod_line_offset (struct gpiod_line *line);
const char *gpiod_line_name (struct gpiod_line *line);
const char *gpiod_line_consumer (struct gpiod_line *line);
int gpiod_line_direction (struct gpiod_line *line);
// GPIOD_LINE_DIRECTION_INPUT, GPIOD_LINE_DIRECTION_OUTPUT
int gpiod_line_active_state (struct gpiod_line *line);
// GPIOD_LINE_ACTIVE_STATE_HIGH, GPIOD_LINE_ACTIVE_STATE_LOW
bool gpiod_line_is_used (struct gpiod_line *line);
bool gpiod_line_is_open_drain (struct gpiod_line *line);
bool gpiod_line_is_open_source(struct gpiod_line *line);
Le programme list-gpio-lines.c parcourt les lignes de chaque contrôleur trouvé et affiche ces informations ainsi :
struct gpiod_line_bulk bulk;
struct gpiod_line *line;
int offset;
const char *string;
fprintf(stdout, "%s - %s - %d lines\n",
gpiod_chip_name(chip),
gpiod_chip_label(chip),
gpiod_chip_num_lines(chip));
if (gpiod_chip_get_all_lines(chip, &bulk) != 0) {
perror("gpiod_chip_get_all_lines()");
return -1;
}
gpiod_line_bulk_foreach_line_off(&bulk, line, offset) {
fprintf(stdout, " %2d: ", offset);
string = gpiod_line_name(line);
if (string == NULL)
fprintf(stdout, "- ");
else
fprintf(stdout, "%s ", string);
string = gpiod_line_consumer(line);
if (string == NULL)
fprintf(stdout, "() ");
else
fprintf(stdout, "(%s) ", string);;
if (gpiod_line_direction(line) == GPIOD_LINE_DIRECTION_OUTPUT)
fprintf(stdout, "out ");
else
fprintf(stdout, "in ");
if (gpiod_line_active_state(line) == GPIOD_LINE_ACTIVE_STATE_LOW)
fprintf(stdout, "active-low ");
if (gpiod_line_is_open_drain(line))
fprintf(stdout, "open-drain ");
if (gpiod_line_is_open_source(line))
fprintf(stdout, "open-source ");
if (gpiod_line_is_used(line))
fprintf(stdout, "* ");
fprintf(stdout, "\n");
}
Voici un exemple d’exécution de ce programme sur un Raspberry Pi 3 :
$ ./list-gpio-lines gpiochip0 - pinctrl-bcm2835 - 54 lines 0: - () in 1: - () in 2: - () in 3: - () in 4: - () in 5: - () in 6: - () in 7: - () in 8: - () in 9: - () in 10: - () in
[...] 50: - () in 51: - () in 52: - () in 53: - () in gpiochip1 - brcmexp-gpio - 8 lines 0: - () out 1: - () out 2: - () out 3: - () out 4: - () in 5: - () out 6: - () out 7: - (led1) in * gpiochip2 - brcmvirt-gpio - 2 lines 0: - (led0) out * 1: - () in $
Accès en lecture et écriture
Avant d’accéder à une ligne GPIO, il est d’usage d’en réserver l’accès. C’est le rôle des fonctions suivantes, qui fonctionne pour une ligne ou pour tout un ensemble. Elles renvoient 0 si elles réussissent et -1 en cas d’échec.
int gpiod_line_request_input(struct gpiod_line *line,
const char *consumer);
int gpiod_line_request_bulk_input(struct gpiod_line_bulk *bulk,
const char *consumer)
int gpiod_line_request_output(struct gpiod_line *line,
const char *consumer,
int initial_value);
int gpiod_line_request_bulk_output(struct gpiod_line_bulk *bulk,
const char *consumer,
const int *initial_values);
Pour libérer l’accès à une ou plusieurs lignes, on emploiera :
void gpiod_line_release(struct gpiod_line *line);
void gpiod_line_release_bulk(struct gpiod_line_bulk *bulk);
Les opérations de lecture et d’écriture sont simples. Lorsqu’elles agissent sur un ensemble, il convient que le tableau passé en second argument soit assez grand pour contenir les valeurs lues ou à écrire.
int gpiod_line_get_value(struct gpiod_line *line);
int gpiod_line_set_value(struct gpiod_line *line,
int value);
int gpiod_line_get_value_bulk(struct gpiod_line_bulk *bulk, int *values);
int gpiod_line_set_value_bulk(struct gpiod_line_bulk *bulk, const int *values)
Le programme invert-gpio.c prend en argument les paramètres contrôleur et offset d’une ligne GPIO d’entrée et d’une ligne de sortie. Ensuite il boucle toutes les millisecondes en écrivant sur la ligne de sortie la valeur inverse de celle lue sur la ligne d’entrée. Hors traitement d’erreur (présent dans le vrai fichier), sa structure est en substance la suivante :
sscanf(argv[2], "%d", &input_offset); sscanf(argv[4], "%d", &output_offset); input_chip = gpiod_chip_open_lookup(argv[1]); output_chip = gpiod_chip_open_lookup(argv[3]); input_line = gpiod_chip_get_line(input_chip, input_offset); output_line = gpiod_chip_get_line(output_chip, output_offset); gpiod_line_request_input(input_line, argv[0]); gpiod_line_request_output(output_line, argv[0], 0);
for (;;) { gpiod_line_set_value(output_line, 1 - gpiod_line_get_value(input_line)); usleep(1000); }
gpiod_line_release(input_line); gpiod_line_release(output_line);
Détection d’événements
Le programme ci-dessus se comporte de manière déplorable, en consommant du temps CPU inutilement (toutes les itérations où l’entrée n’a pas changé de valeur) et en risquant de manquer des événments brefs où l’entrée change deux fois d’état pendant la milliseconde de sommeil.
Il serait largement préférable d’attendre passivement que le noyau nous indique qu’une transition est survenue sur la ligne d’entrée pour faire l’écriture correspondant en sortie. Pour cela la bibliothèque Libgpiod met à notre disposition des fonctions d’attente. Tout d’abord on indique pour quel type d’événment on souhaite se mettre en attente
int gpiod_line_request_rising_edge_events(
struct gpiod_line *line, const char *consumer); int gpiod_line_request_bulk_rising_edge_events(
struct gpiod_line_bulk *bulk, const char *consumer); int gpiod_line_request_falling_edge_events(
struct gpiod_line *line, const char *consumer); int gpiod_line_request_bulk_falling_edge_events(
struct gpiod_line_bulk *bulk, const char *consumer); int gpiod_line_request_both_edges_events(
struct gpiod_line *line, const char *consumer); int gpiod_line_request_bulk_both_edges_events(
struct gpiod_line_bulk *bulk, const char *consumer);
On peut ensuite se mettre en attente de l’occurrence d’un événement souhaité :
int gpiod_line_event_wait(struct gpiod_line *line,
const struct timespec *timeout);
int gpiod_line_event_read(struct gpiod_line *line,
struct gpiod_line_event *event);
int gpiod_line_event_wait_bulk(
struct gpiod_line_bulk *bulk,
const struct timespec *timeout,
struct gpiod_line_bulk *event_bulk);
La première fonction attend que l’événement se produise avec une durée maximale si on le souhaite. Si on attend n’importe quel type de front, il convient de savoir si l’événement survenu est une montée ou une descente du signal. Pour cela on invoque la seconde fonction, qui renseigne une structure contenant le type d’événement et son horodatage.
struct gpiod_line_event {
struct timespec ts;
int event_type;
// GPIOD_LINE_EVENT_RISING_EDGE, GPIOD_LINE_EVENT_FALLING_EDGE
};
Le programme wait-gpio-event.c reprend le même comportement que le précédent mais ne se réveille que lorsqu’un changement d’état sur la ligne GPIO d’entrée est détecté. Les modifications principales sont :
[...]
gpiod_line_request_both_edges_events(input_line, argv[0]);
gpiod_line_request_output(output_line, argv[0], 0);
gpiod_line_set_value(output_line,
1 - gpiod_line_get_value(input_line));
for (;;) {
gpiod_line_event_wait(input_line, NULL);
if (gpiod_line_event_read(input_line, &event) == 0) {
if (event.event_type == GPIOD_LINE_EVENT_RISING_EDGE)
gpiod_line_set_value(output_line, 0);
else
gpiod_line_set_value(output_line, 1);
}
}
La fonction gpiod_line_event_wait() utilise en interne l’appel système ppoll() pour réaliser l’attente passive. Si nous souhaitons réaliser nous même l’attente, en ajoutant par exemple des descripteurs de sockets réseau, de périphériques caractères (série, i2c…), de console, etc. on utilisera les fonctions suivantes pour obtenir le descripteur et lire l’événement survenu.
int gpiod_line_event_get_fd(struct gpiod_line *line);
int gpiod_line_event_read_fd(int fd,
struct gpiod_line_event *event);
PERFORMANCES
Nous avons vu dans cet article et les précédents plusieurs méthodes d’accès aux lignes GPIO. Certaines sont plus simples que d’autres, mais une question se pose : qu’en est-il des performances ? De la vitesse de commutation d’une ligne par exemple ?
Une méthode simple consiste à faire un petit programme qui alterne une sortie le plus rapidement possible et à observer le résultat à l’oscilloscope.
Les exemples ci-dessous ont été exécutés sur un Raspberry Pi 3, après l’avoir basculé en mode performance plutôt que ondemand :
$ sudo -i
# echo performance > /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
# exit
Commande gpioset depuis un script shell
Nous nous en doutons immédiatement, l’appel d’une commande depuis le shell ne sera pas la méthode la plus rapide. Vérifions quand même le fonctionnement. Pour cela, j’appelle la ligne de commande suivante :
$ while true; do gpioset /dev/gpiochip0 24=0; gpioset /dev/gpiochip0 24=1; done
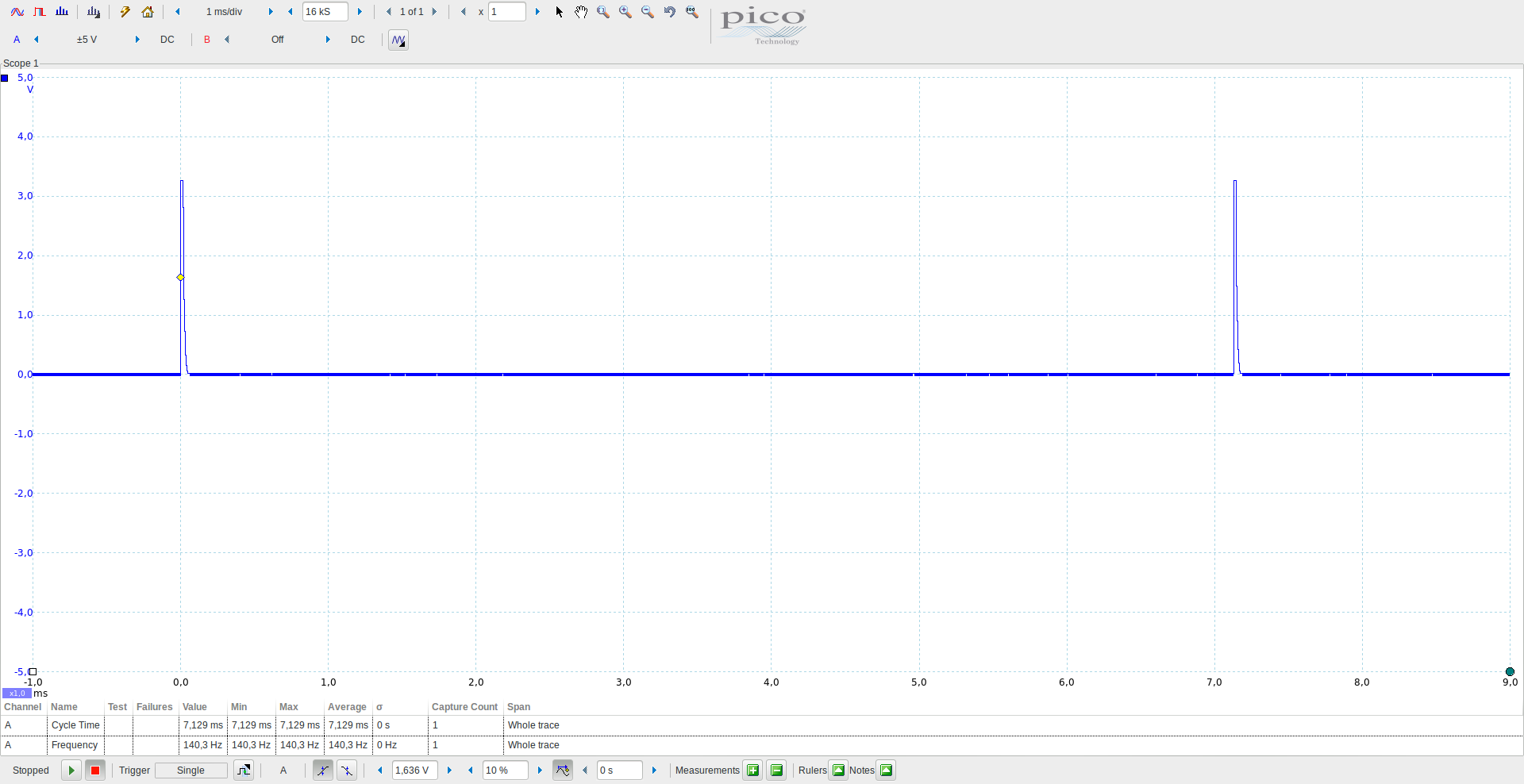
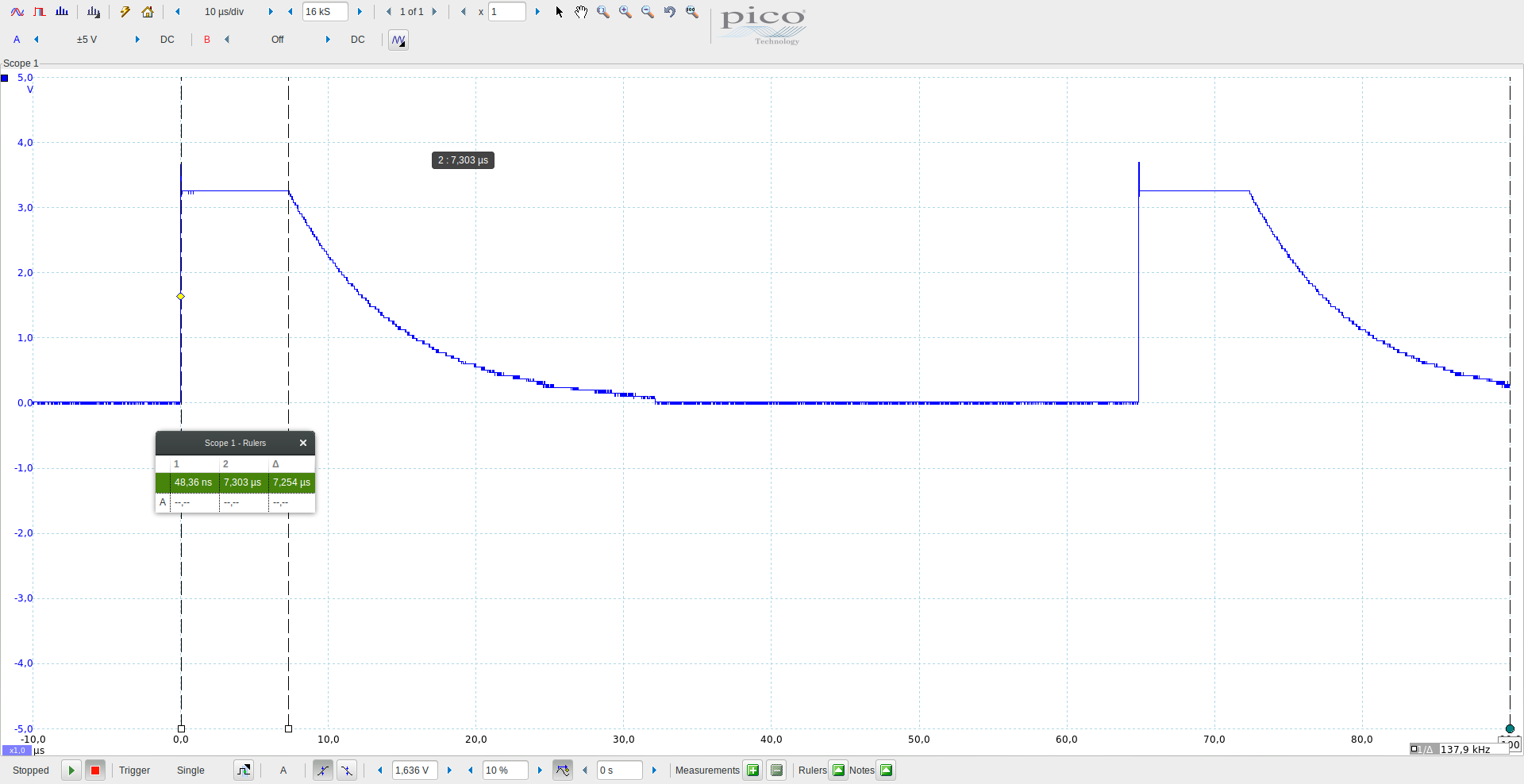
gpiosetNous voyons deux pics espacés de 7,13 millisecondes. Cet énorme écart est moins dû aux performances du shell (une boucle simple à incrémenter une variable durant environ 0,5 milliseconde) qu’au temps d’appel de la commande gpioset et à la configuration du contrôleur et de la ligne GPIO. Il faut donc 3,5 millisecondes pour exécuter une commande gpioset. Zoomons sur un pic :
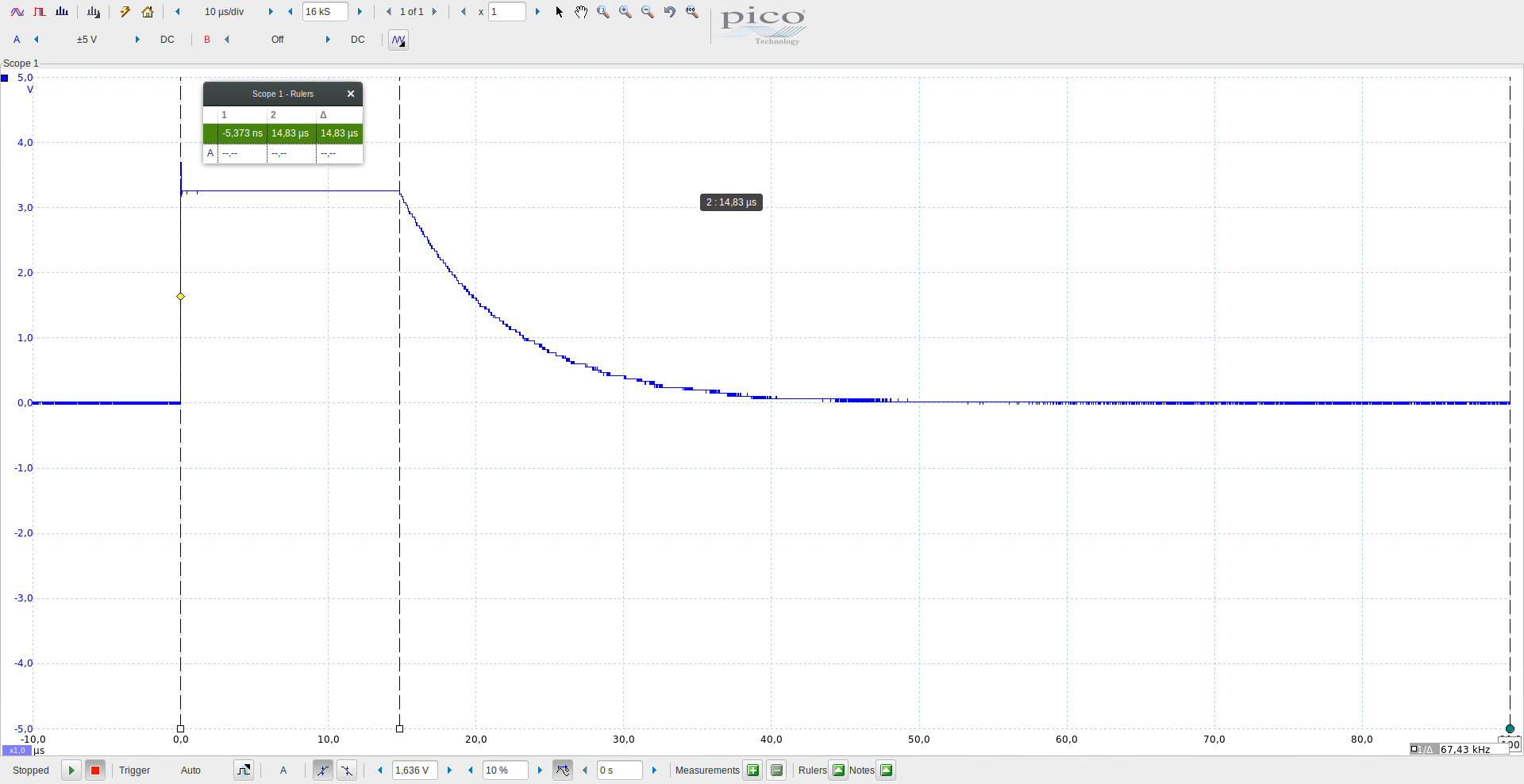
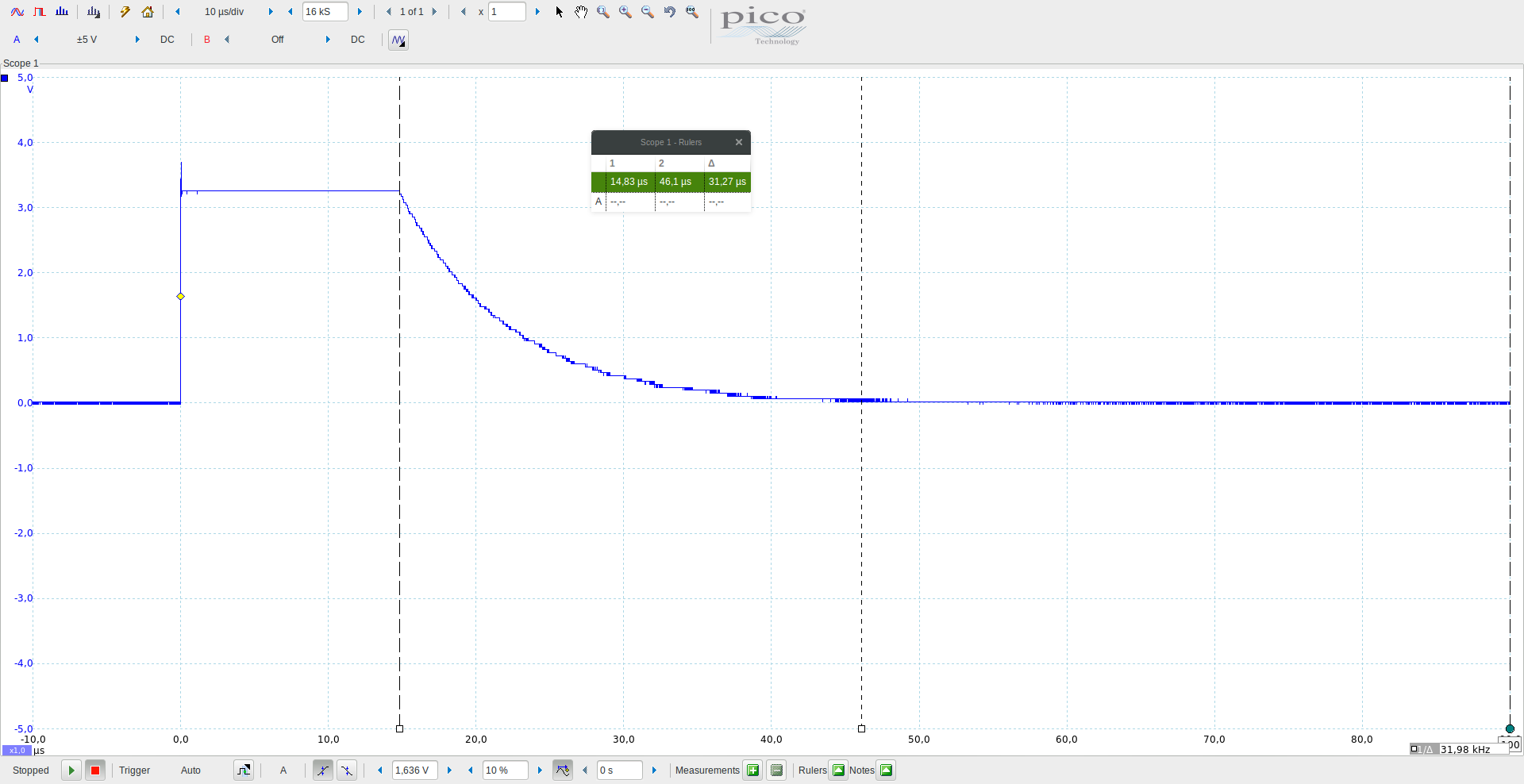
gpiosetEn observant de plus près l’un des pics, on voit qu’une fois la sortie activée, elle reste à l’état haut pendant 15 microsecondes environ, puis qu’elle est relâchée par la commande, retournant à l’état bas par une courbe de décharge d’une trentaine de microsecondes.
API context-less de Libgpiod
Nous pouvons reprendre le programme toggle-gpio.c de l’article précédent pour le modifier rapidement et faire une boucle la plus rapide possible autour de la fonction gpiod_ctxless_set_values().
C’est ce que réalise le programme ctxless-toggle-gpio.c :
[...]
for (;;) {
gpiod_ctxless_set_value(argv[1], offset, 0, 0, argv[0], NULL, NULL);
gpiod_ctxless_set_value(argv[1], offset, 1, 0, argv[0], NULL, NULL);
}
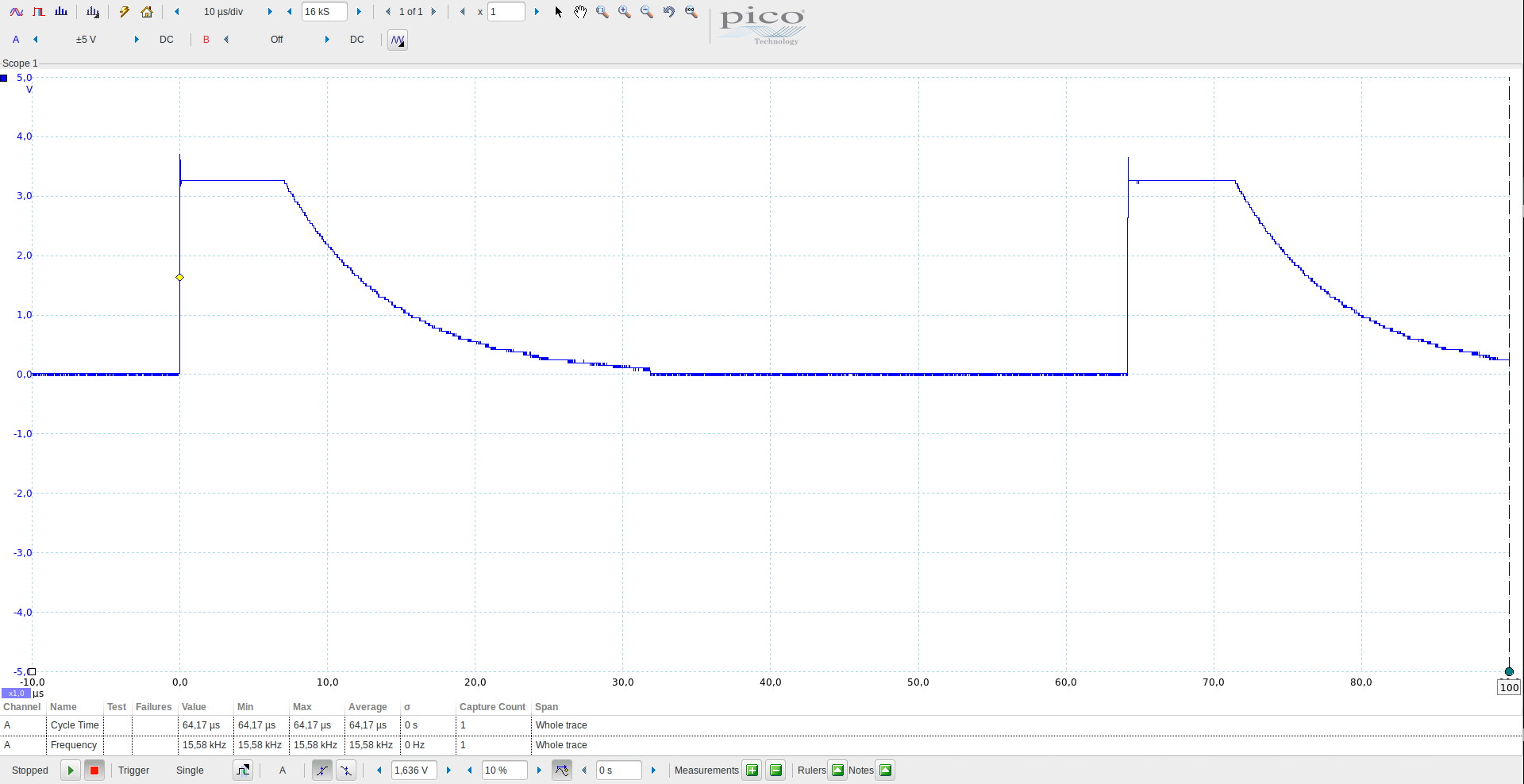
Le résultat est déjà nettement meilleur que le précédent, les pics sont espacés de 64 microsecondes.
gpiod_ctxless_set_value()La broche reste à l’état haut sept microsecondes avant de revenir à l’état bas en une vingtaine de microsecondes. On peut conclure qu’un changement d’état avec l’API contex-less de Libgpiod dure environ 32 microsecondes.
API bas-niveau de Libgpiod
L’étape suivante va consister à utiliser l’API bas-niveau de Libgpiod, celle que nous avons étudié dans cet article. Le programme low-level-toggle-gpio.c réalise ce travail :
[...]
for (;;) { gpiod_line_set_value(output_line, 0); gpiod_line_set_value(output_line, 1); }
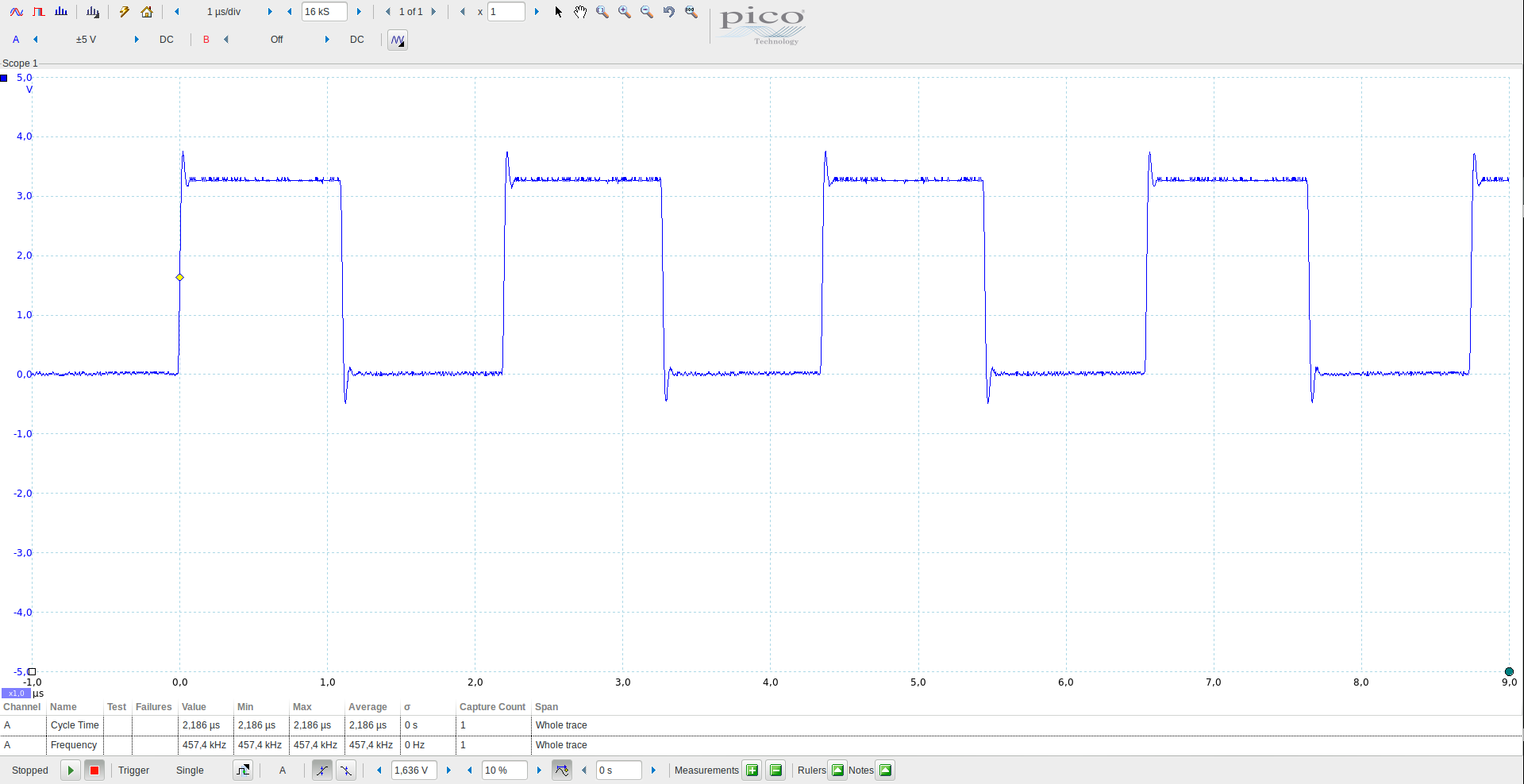
gpiod_line_set_value()Le résultat est sans appel, le temps d’un cycle complet est de 2,19 microsecondes, et la ligne ne revenant pas en haute impédance, il n’y a plus de courbe de décroissance comme dans les exemple précédentes.
Cette fonction permet donc de configurer la ligne GPIO en 1,09 microseconde. Elle présente quand même un très léger overhead par rapport à l’appel système ioctl() direct que nous avons évoqué dans l’article précédent.
Appel système ioctl()
Logiquement l’invocation directe de l’appel système sous-jacent à toutes ces fonctions devraient être plus performante. Il nous suffit de modifier légèrement le programme de l’article précédent pour obtenir un programme ioctl-fast-toggle-gpio.c :
[...]
output_values.values[0] = 0;
for (;;) {
output_values.values[0] = 0;
ioctl(output_request.fd, GPIOHANDLE_SET_LINE_VALUES_IOCTL, &output_values);
output_values.values[0] = 1;
ioctl(output_request.fd, GPIOHANDLE_SET_LINE_VALUES_IOCTL, &output_values);
}
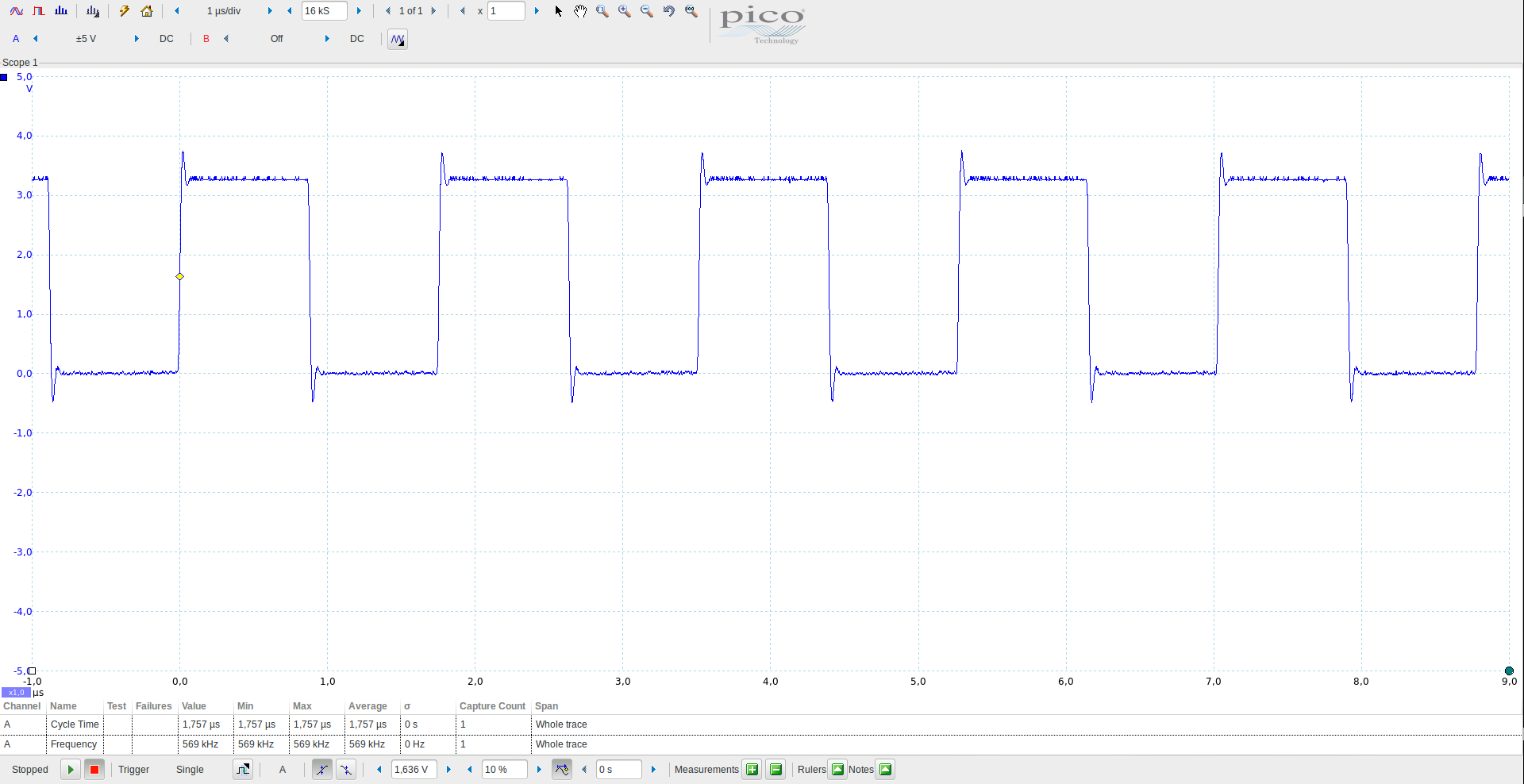
ioctl()En effet, une légère amélioration est perceptible, le cycle complet se déroulant en 1,76 microsecondes, donc la configuration d’une sortie durant 0,88 microseconde. Ceci est très correct pour une action depuis l’espace utilisateur sur un processeur comme celui du Raspberry Pi 3.
CONCLUSION
Nous avons pu voir que l’API bas-niveau proposée par la bibliothèque Libgpiod est riche et assez simple à utiliser. Elle remplace avantageusement les accès via sysfs et offre la portabilité qui manque aux solutions comme WiringPi spécifiques à certaines plates-formes. La surcharge par rapport à l’invocation directe de l’appel-système ioctl() est minime, et la complexité sensiblement moindre.
RÉFÉRENCES
- [GOLASZEWSKI 2017] Bartosz Golaszewsi : Doxygen documentation of gpiod.h.
- [GOLASZEWSKI 2018] Bartosz Golaszewski : “New GPIO Interface for User Space (video)” Kernel Recipes 2018.
- [WALLEIJ 2016] Linus Walleij : “GPIO for Engineers and Makers“, Las Vegas 2016.
Bonjour,
Article très intéressant ! J’utilise également cette librairie sur un core i7 (broches GPI[0..3] & GPO[0..3]), sur une carte que nous avons développé. Je n’arrive cependant pas à des temps de commutations de l’ordre de la dizaine de microsecondes mais plutôt à des temps de commutations de l’ordre de 30 millisecondes !
Avez vous déjà réalisé des tests sur des plateformes Intel ?
Cordialement,
Bonjour,
Non je n’ai pas essayé sur des plateformes Intel, mais 30 ms ça me paraît vraiment beaucoup !
C’est un test en C/C++ ?
Bonjour cpb,
Oui c’est un test en C !
Au niveau matériel, il s’agit d’une connexion directe entre les broches GPIO d’un connecteur COM Express type 10 et des broches d’un connecteur de type micro SDCard. L’idée est d’utiliser la carte SD en mode SPI legacy.
Au niveau logiciel, j’ai juste fait un wrapper autour de libgpiod pour gérer les GPIO. Puis une petite surcouche SPI pour créer les transferts. Je posterais les sources lundi, quand je serais de retour au bureau :).
Merci encore pour la réponse.
Christophe,
Bonjour,
Comme convenu, les extraits du code pour la manipulation des GPIO.
#
# GPIO
#
int gpio_init(gpio_t * gpio){
int ret = 0;
/* Retrieve gpio using chip name and
* line which represent a « port » and a « pin »
* in a microcontroller */
gpio->chip = gpiod_chip_open_by_name(gpio->dev);
if (!gpio->chip) {
fprintf(stderr, « Open chip failed\n »);
perror(« »);
goto abort;
}
gpio->line = gpiod_chip_get_line(gpio->chip, gpio->pin);
if (!gpio->line) {
fprintf(stderr, « Get line %d failed\n », gpio->pin);
perror(« »);
goto abort;
}
/* Then set gpio as input or output according
* to user settings. For output pins only, set
* also gpio initial state */
if(gpio->type == GPIO_TYPE_OUTPUT){
ret = gpiod_line_request_output(gpio->line, CONSUMER,
gpio->state);
if (ret pin);
perror(« »);
goto abort;
}
}
else{
ret = gpiod_line_request_input(gpio->line, CONSUMER);
if (ret pin);
perror(« »);
goto abort;
}
}
return 0;
abort:
return 1;
}
int gpio_deinit(gpio_t * gpio){
gpiod_line_release(gpio->line);
gpiod_chip_close(gpio->chip);
return 0;
}
void gpio_set(gpio_t * gpio,
uint8_t state){
gpiod_line_set_value(gpio->line, state);
}
uint8_t gpio_get(gpio_t * gpio){
return gpiod_line_get_value(gpio->line);
}
#
# SPI
#
int spi_init(spi_t * spi){
int ret;
/* Initialize all gpio in a spi
* structure */
ret = gpio_init(&spi->csn);
if(ret)
goto abort;
ret = gpio_init(&spi->clk);
if(ret)
goto abort;
ret = gpio_init(&spi->data_in);
if(ret)
goto abort;
ret = gpio_init(&spi->data_out);
if(ret)
goto abort;
return 0;
abort:
return 1;
}
int spi_deinit(spi_t * spi){
gpio_deinit(&spi->data_out);
gpio_deinit(&spi->data_in);
gpio_deinit(&spi->clk);
gpio_deinit(&spi->csn);
return 0;
}
uint8_t spi_xfer(spi_t * spi,
uint8_t len, uint8_t * data){
uint8_t clk, idx;
uint8_t byte_in;
uint8_t byte_out;
/* Send and receive bytes one by one */
for(idx = 0; idx != len; idx++){
byte_in = 0x00;
byte_out = data[idx];
/* Create clock pulse, set data out
* value and sample data in value */
for(clk = 0; clk != 8; clk++){
gpio_set(&spi->data_out, (byte_out & 0x80));
gpio_set(&spi->clk, 1);
usleep(10);
byte_in |= gpio_get(&spi->data_in);
gpio_set(&spi->clk, 0);
usleep(10);
byte_out <<= 1;
if(clk != 0x07)
byte_in <<= 1;
}
data[idx] = byte_in;
}
return 0;
}
#
# MAIN
#
#include
#include « spi.h »
#define BUF_LEN 128
#define SDIO_CMD00 0x00
#define SDIO_CMD01 0x01
#define SDIO_CMD08 0x08
uint8_t sdio_init(spi_t * spi){
uint8_t ret;
uint8_t clk;
/* Initialize spi gpio and create
* 74 clock pulse to ensure sdcard
* is in idle state */
spi_init(spi);
if(ret)
return 1;
/* Set default state for spi gpio
* and create startup pulses */
gpio_set(&spi->csn, 0);
gpio_set(&spi->clk, 0);
gpio_set(&spi->data_out, 1);
usleep(10000);
gpio_set(&spi->csn, 1);
for(clk = 0; clk != 80; clk++){
gpio_set(&spi->clk, 1);
usleep(10);
gpio_set(&spi->clk, 0);
usleep(10);
}
return 0;
}
uint8_t sdio_deinit(spi_t * spi){
spi_deinit(spi);
return 0;
}
uint8_t sdio_xfer(spi_t * spi,
uint8_t cmd,
uint32_t arg){
uint8_t data[BUF_LEN];
memset(data, 0xFF, BUF_LEN);
data[1] = (0x40 | cmd);
data[2] = ((arg >> 24) & 0xFF);
data[3] = ((arg >> 16) & 0xFF);
data[4] = ((arg >> 8) & 0xFF);
data[5] = (arg & 0xFF);
if(cmd == SDIO_CMD00)
data[6] = 0x95;
else if(cmd == SDIO_CMD08)
data[6] = 0x87;
else
data[6] = 0x01;
gpio_set(&spi->csn, 0);
spi_xfer(spi, 9, data);
gpio_set(&spi->csn, 1);
return data[8];
}
int main(void){
spi_t spi = { .csn = { .pin = 0,
.type = GPIO_TYPE_OUTPUT,
.state = 0,
.dev = « gpiochip0 » },
.clk = { .pin = 4,
.type = GPIO_TYPE_OUTPUT,
.state = 0,
.dev = « gpiochip0 » },
.data_out = { .pin = 7,
.type = GPIO_TYPE_OUTPUT,
.dev = « gpiochip0 »,
.state = 1 },
.data_in = { .pin = 2,
.type = GPIO_TYPE_INPUT,
.dev = « gpiochip0 » }};
uint8_t ret;
uint8_t try;
uint8_t init = 0;
/* Open sdio device */
fprintf(stdout, « Open sdcard device « );
fflush(stdout);
ret = sdio_init(&spi);
if(ret)
goto abort;
fprintf(stdout, « [OK]\n »);
/* Reset sdio device */
for(try = 0; try != 3; try++){
fprintf(stdout, « Reset sdcard (%d/3) « , (try + 1));
fflush(stdout);
ret = sdio_xfer(&spi, SDIO_CMD00, 0x00);
if(ret != 0xFF){
fprintf(stdout, « [OK]\n »);
init = 1;
break;
}
else
fprintf(stdout, « [KO]\n »);
}
if(!init)
goto abort;
/* Initialize sdio device */
ret = sdio_xfer(&spi, SDIO_CMD08, 0x1AA);
abort:
/* Close sdio device */
fprintf(stdout, « Close sdcard device « );
fflush(stdout);
sdio_deinit(&spi);
fprintf(stdout, « [OK]\n »);
return 0;
}