J’ai assisté il y a quelques jours, lors de l’édition 2018 des Kernel Recipes à une présentation par Bartosz Golaszewski de la nouvelle interface des GPIO pour l’espace utilisateur de Linux. J’en avais eu un bref aperçu il y a quelques mois mais je n’avais pas encore pris le temps d’essayer cette API. Cet article est donc une brève présentation et mise en œuvre de ces outils.
Lire la suite de cette entrée »![]()
L’édition d’automne du Paris Embedded Meetup s’est tenue le jeudi 13 septembre à l’EPITA (14, rue Voltaire — 94270 Le Kremlin-Bicêtre. Métro « Porte d’Italie ») Amphi 3.
Au programme :
- Helmut MÜLLER : « Présentation de Zdanetix, un système de domotique sur Raspberry Pi. »
- Romain NAOUR : « Intégration de la chaîne de compilation LLVM/Clang dans Buildroot »
- Christophe BLAESS : « Système embarqué, objet connecté – De l’idée initiale à la production en série. »
Les slides sont disponibles sur https://paris-embedded.fr/
Projet Pi-Logger
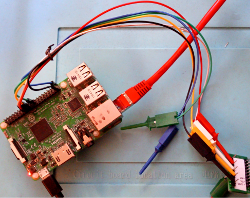
Lors de la mise au point d’un système industriel, il est souvent nécessaire de surveiller les signaux de sortie d’un équipement.
Bien sûr l’oscilloscope et l’analyseur de trames sont indispensables pour l’analyse des signaux instantanés, mais lors des phases de validation d’un produit, il faut généralement faire des observations longues, sur plusieurs heures ou plusieurs jours. Je vous propose un petit outil prévu pour ce genre d’analyse.
![]()
La dixième édition du meetup « Paris Embedded » se tiendra le mardi 13 mars 2018 à partir de 19h00 à l’EPITA (14, rue Voltaire — 94270 Le Kremlin-Bicêtre. Métro « Porte d’Italie ») Amphi 1.
Au programme, trois conférences alléchantes :
- Romain Naour : « Les nouveautés de Buildroot 2018« ,
- Julio Guerra : « Le débogueur GDB au service de l’embarqué« ,
- Pierre Ficheux : « Intégration continue, tests unitaires et validation avec Yocto« .
Les conférences seront suivies d’un moment de discussions informelles et conviviales autour de pizzas.
L’entrée est ouverte à tous, la participation aux frais s’élève à 10 €.
Pour des raisons d’organisation, il est préférable de vous inscrire au préalable sur le site meetup.com.
Tout d’abord, je vous souhaite à tous une excellente année 2018 !
Dans l’article Projet spi-tools, je présentais un petit outil permettant de configurer les paramètres d’une liaison SPI depuis la ligne de commande du shell, en s’appuyant sur l’interface spidev. Depuis quelques temps, l’une des options de cet outil ne fonctionnait plus correctement. En effet, plusieurs drivers SPI du kernel réinitialisent la vitesse de communication lorsque l’on referme le descripteur de fichier /dev/spidevX.Y.
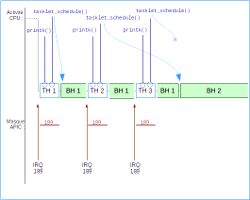
Il existe plusieurs mécanismes proposés par le noyau Linux pour programmer un traitement à réaliser lorsqu’un périphérique externe déclenche une interruption pour nous notifier de l’occurrence d’un événement. Gestionnaire monolithique, tasklet, workqueue, threaded interrupt, chaque solution a des avantages et des inconvénients, qu’il est intéressant de connaître pour optimiser l’efficacité de nos traitements.
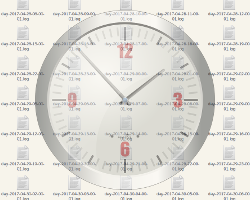
J’ai récemment été confronté à un souci de taille de fichiers de traces pour le débogage d’une application. Pour résoudre mon problème j’ai écrit un petit programme en ligne de commande permettant de répartir la sortie d’un pipeline du shell dans des fichiers quotidiens.
J’ai appelé cet outil dailyfile et je vous le présente ici, en espérant qu’il puisse servir à d’autres.
Le modeste programme présenté dans cet article est extrait d’un exercice de travaux pratiques que je propose aux participants de la formation « Programmation en C sur microcontrôleurs » que j’anime régulièrement. Cet exercice permet de réfléchir en profondeur sur le développement d’un petit projet sur microcontrôleur.
Comme l’objet même de la réalisation peut être utile au quotidien (je l’emploie personnellement), j’ai trouvé intéressant de le partager ici.

En ce 1er avril, je vous propose un mini hack amusant, qui peut être mis à profit pour piéger des collègues en open space ou en salle de TP par exemple.
Il s’agit d’émuler un clavier USB, et de lui faire écrire des phrases préprogrammées pour simuler un interlocuteur fantôme cherchant à communiquer avec nous.