La future branche 6.12 du noyau Linux, qui sera publiée à la fin du mois de novembre, contiendra plusieurs nouveautés par rapport au noyau actuel. La plus commentée depuis deux semaines concerne l’intégration complète du patch PREEMPT_RT dans le noyau. Annoncée lors du Maintainer Summit du 17 septembre dernier, cette intégration se manifeste par un patch sur la fonction printk() qui représentait le dernier point de blocage.
Il n’y aura donc plus besoin de patch pour bénéficier de la préemptibilité totale du noyau sur les trois architectures principales pour le temps réel : x86, riscv et aarch64 (ARM 64 bits). Il faudra néanmoins toujours appliquer un patch (du moins pendant quelques temps) pour l’architecture ARM 32 bits par exemple.
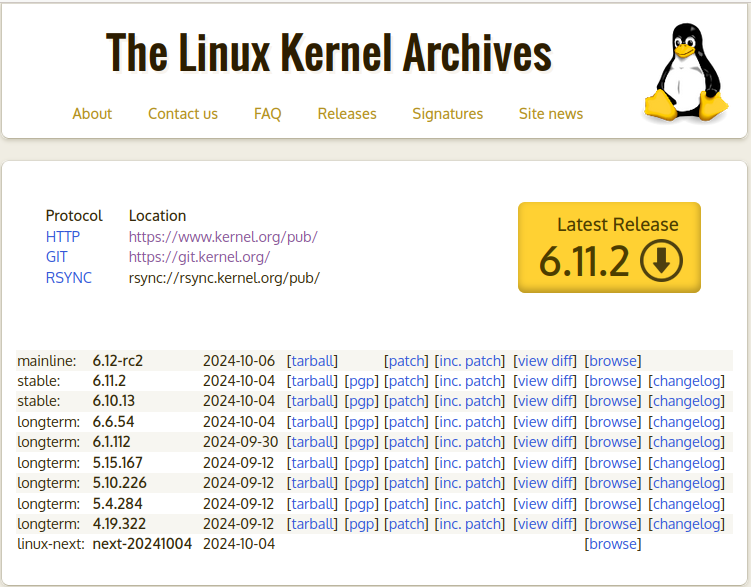
Comment tester cette nouveauté ? C’est très simple : je vous propose de faire un build rapide pour une machine virtuelle Risc-V 64 bits en utilisant Buildroot et la version release candidate 6.12-rc2 du kernel, disponible depuis quelques heures.
Lire la suite de cette entrée »
 Depuis plusieurs années l’installation de Xenomai sur un Raspberry Pi 1 se fait assez facilement, et les résultats en sont plutôt satisfaisants. Malheureusement l’installation sur un Raspberry Pi 2 ne fonctionnait pas. Le problème a été résolu depuis quelques mois par un patch de Mathieu Rondonneau qui permet d’utiliser la toute dernière version de Xenomai (3.0.2).
Depuis plusieurs années l’installation de Xenomai sur un Raspberry Pi 1 se fait assez facilement, et les résultats en sont plutôt satisfaisants. Malheureusement l’installation sur un Raspberry Pi 2 ne fonctionnait pas. Le problème a été résolu depuis quelques mois par un patch de Mathieu Rondonneau qui permet d’utiliser la toute dernière version de Xenomai (3.0.2).